PCG 基础篇:概念浅析
此前写过一篇常用类浅析,但过于简单,写一篇细致一点的,重新温习一下。
PCG节点的数据类型
根据官网说法,PCG框架中的数据分为以下几种类型:
- 空间数据 (Spatial Data)
- 组合数据 (Composite Data)
- 属性集 (Attribute Sets)
空间数据有以下这些具体子类实现:
UPCGSpatialData常用子类:
空间数据包含二维(2D)或三维(3D)空间的引用,可以表示体积、高度场、样条线和点数据。
| 数据类型 | 描述 | 用途/特点 |
|---|---|---|
| 体积 (UPCGVolumeData) | 表示3D形状的空间数据 | - 用于布尔集运算 - 使用Volume Sampler节点直接从关卡中采样 |
| 表面 (UPCGSurfaceData) | 表示2D数据的空间数据类型 | - 映射到XY平面的地形 - Surface Sampler节点在2D平面生成点并投影到3D形状 |
| 线条 (UPCGSplineData) | 表示Spline和Landscape Spline组件 | - 读取样条线的关键点、切线和点缩放 - Landscape Spline垂直投影,始终应用于表面 - 通过Get Spline Data和Spline Sampler节点引用 |
| 点 (UPCGPointData) | 表示3D空间中表面或体积的点集合 | - 具有相关边界,可表示不同维度形状 - 点大小决定形状表示精度 - 每个点有0-1的密度值 - 与密度值共同表示空间中的浮点函数 |
UPCGSpatialData (抽象基类)
├── UPCGPointData (点数据)
├── UPCGSplineData (样条线)
├── UPCGSurfaceData (表面)
├── UPCGVolumeData (体积)
└── UPCGCompositeData (复合数据)
├── UPCGUnionData (并集)
├── UPCGIntersectionData (交集)
└── UPCGDifferenceData (差集)这些派生类,有个共同的能力:可以转换为点数据(UPCGPointData)。
以上是官方文档关于PCG类型部分的全部文档了,非常简洁🫣非常虚幻🫣
蓝图表现
这里记录PCG Graph 中,展现上述类型的样子。(UE5.5)
空间数据 (Spatial Data)
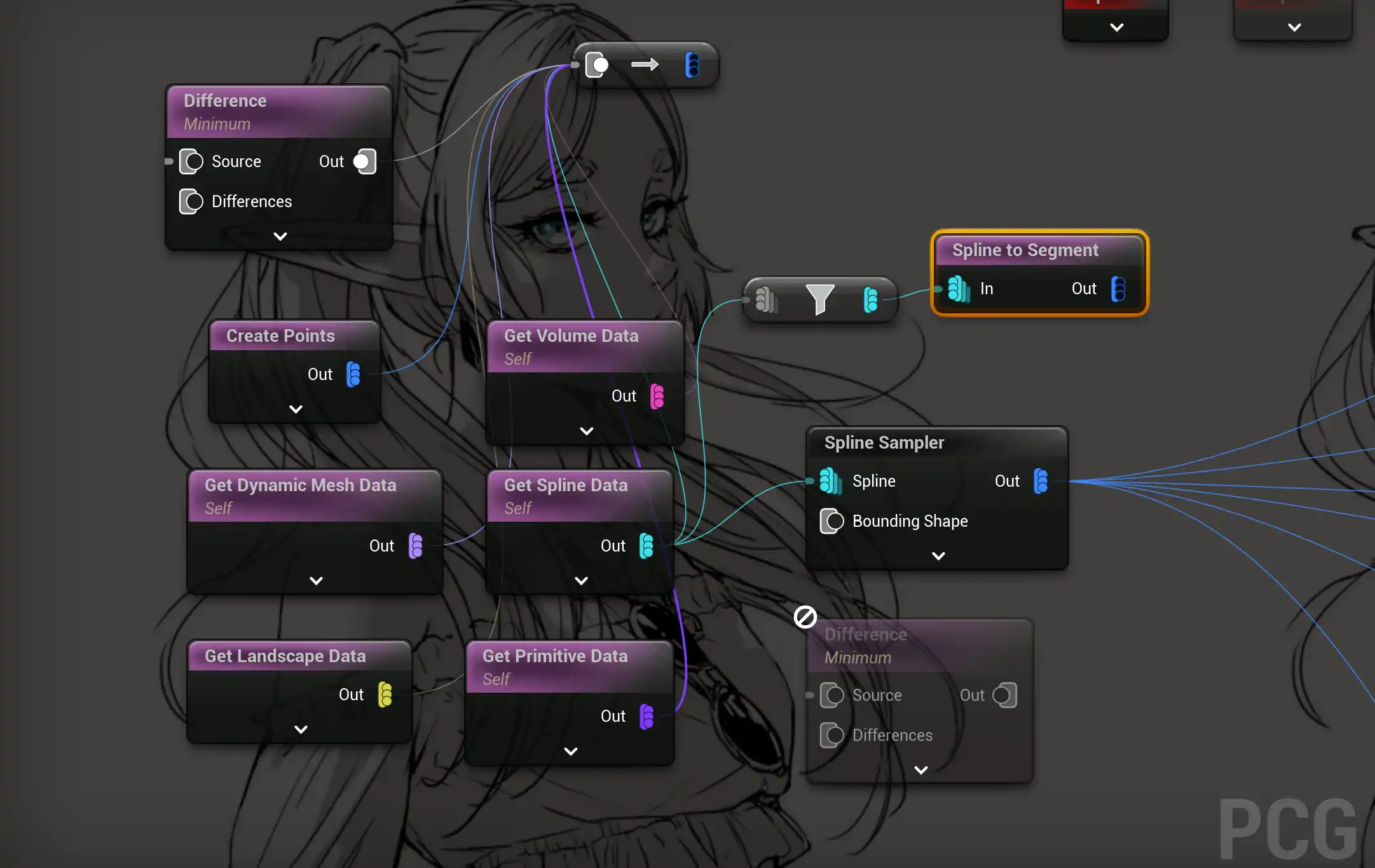
数据类型主要在节点的输入输出PIN上面体现
点类型(UPCGPointData)
 PCG中最常见的类型,最频繁交互的类型,如图,到处都是这种浅蓝色的连接点。
PCG中最常见的类型,最频繁交互的类型,如图,到处都是这种浅蓝色的连接点。
- 目录:Concrete (分类细节:高级类型)
- 实际类型:Point
- 淡蓝色的连线来表示
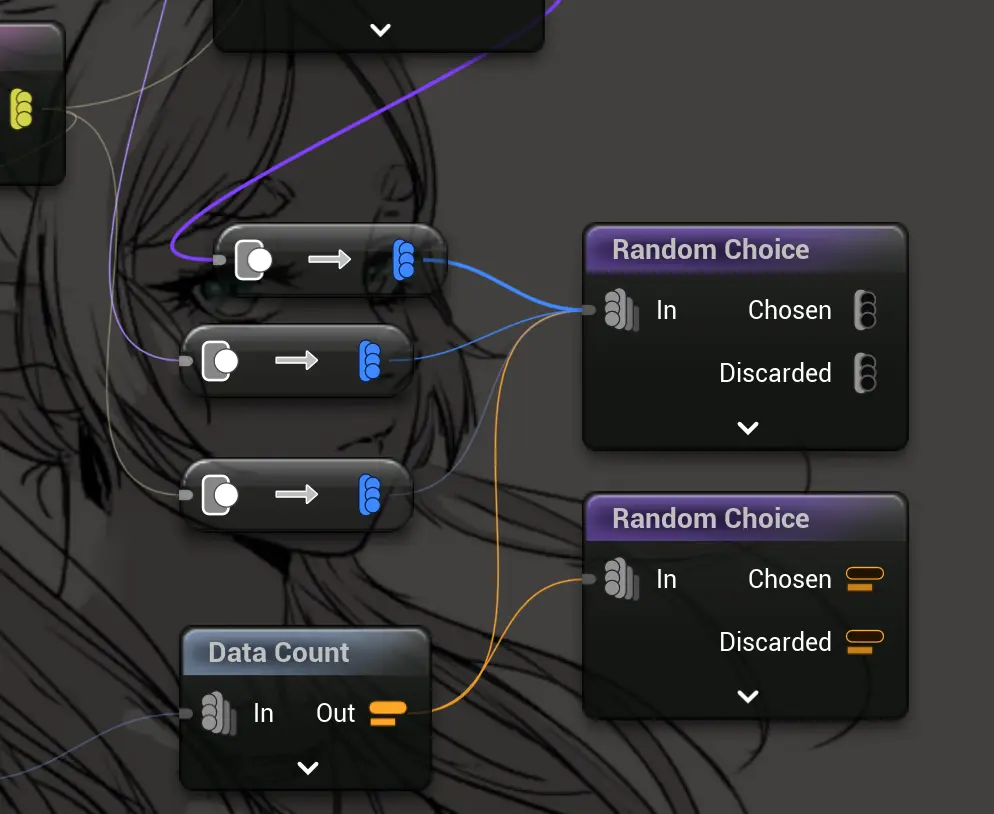
任意 Any
- 灰色是Any的类型的标识
- 根据输入,自动匹配输出类型:下图的RandomChoice节点会自动匹配输出类型
具象类型(Concrete分类,点,样条,体积等)
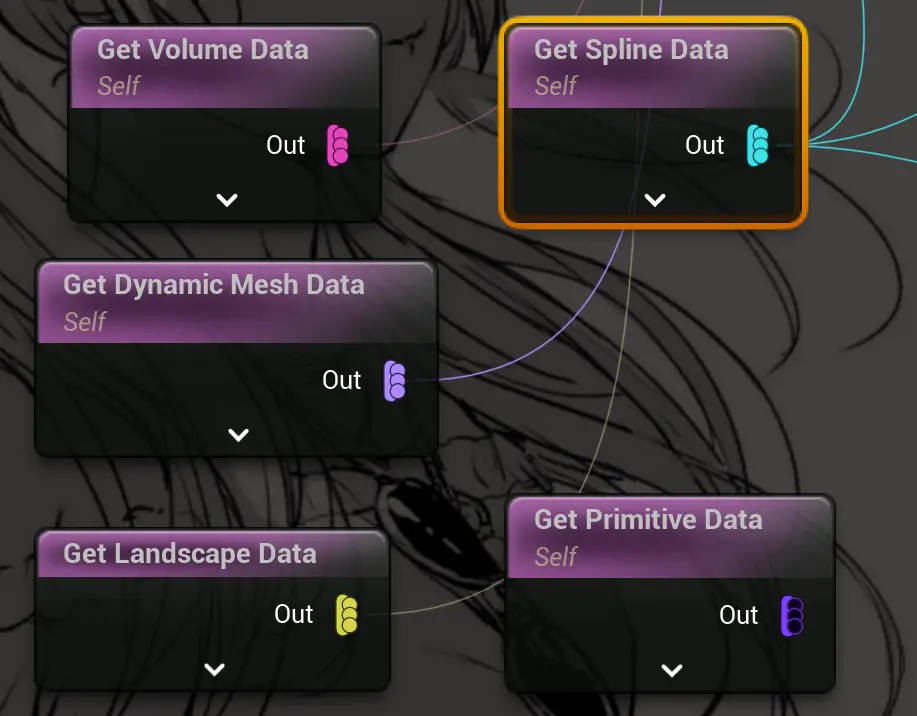
- 都能提供 自身的具体数据, 可以看到它们的输出图标都一样,都是一根竖线上的3个小点,只是颜色不同
- PIN的颜色代表不同类型的数据
- PIN上面的三个小点,代表它们输出是“一排数据”,或者说,有提供具体子项类型的能力。
Spatial Data,父类类型
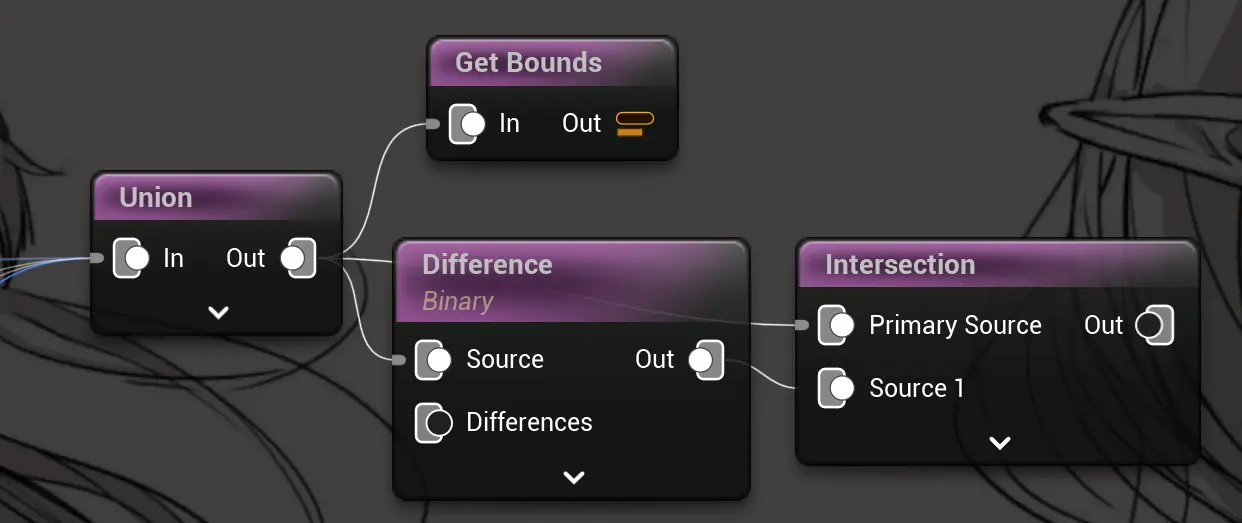
- PIN就会变成一个大矩形叠加一个小圆点
- 因为不针对特定的子类型,所以不会有颜色,只用黑白表示连接状态。
- 空间类型能够输出自己特化的“Point Data”列表(ToPoint )
空间类型,调用 ToPoint 节点 即可获得点数据 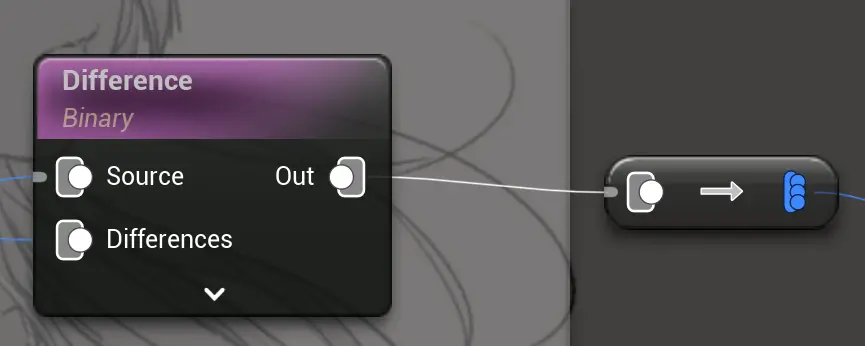
复合数据 (Composite Data)
复合数据是集合运算的结果,例如并集、交集和差集。比如上图里的Difference节点的输出和输入。 针对Difference这类节点来说,它输出的数据类是UPCGDifferenceData,也是 UPCGSpatialData 的子类,所以可是使用ToPoint节点。
属性集 (Attribute Sets)
属性集是上述所有类型共有的字段,因为 全部PCG数据类型的基类都是UPCGData。(如 UPCGSpatialData 也继承于它。)
属性集是以元数据(Metadata)形式存储,Metadata可以理解成一个Map表
可以通过virtual UPCGMetadata* MutableMetadata() { return nullptr; }访问它
查看输入/输出的MetaData数据
每个FPCGPoint结构体都持有一个UPCGMetadata,不是点类型的,就是UPCGParamData类型,都能查看他们的MetaData。
选中节点,按A即可查看(这里截图不全,最后面的才是MetaData,前面是Point Data 结构体的数据) 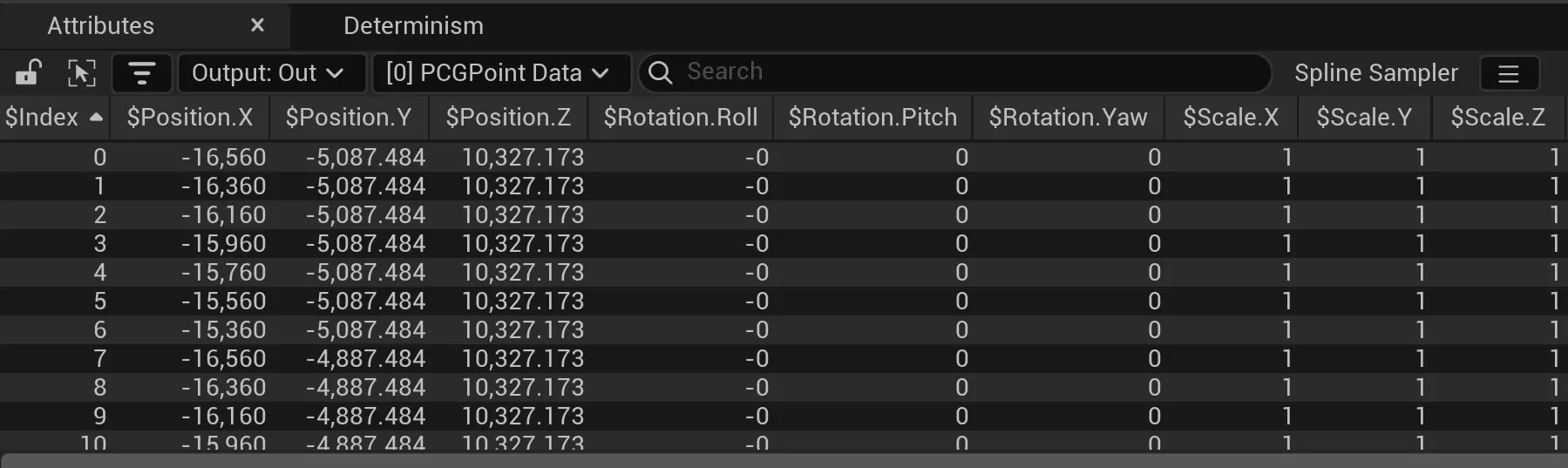
修改属性集 MetaData
可以手动给输出数据,增加一些自定义属性 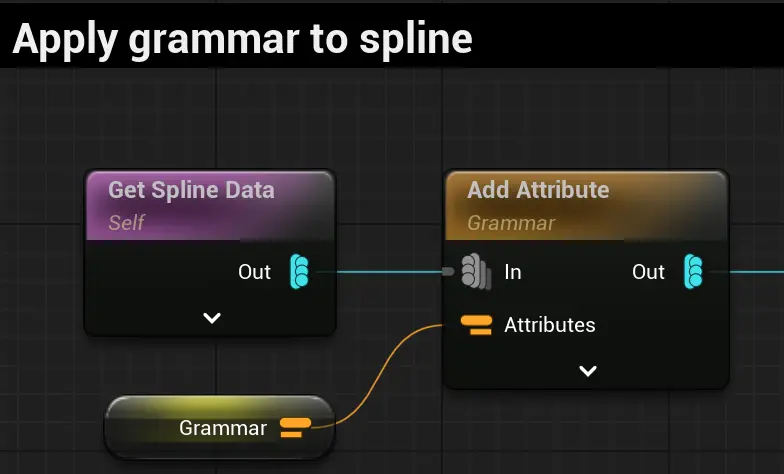 内部是使用了 UPCGParamData 传递参数到metadata
内部是使用了 UPCGParamData 传递参数到metadata
参数数据(
UPCGParamData)是一个特殊的数据类型,用于在PCG图中存储和传递执行参数。它直接继承自UPCGData,主要用于节点间的参数传递。
关键函数PCGMetadataHelpers::CopyAllAttributes
// 把 属性添加给输入数据
for (const FPCGTaggedData& SourceParamData : SourceParams)
{
if (const UPCGParamData* ParamData = Cast<UPCGParamData>(SourceParamData.Data))
{
bSuccess &= PCGMetadataHelpers::CopyAllAttributes(ParamData, TargetData, Context);
}
}PCG基本操作
篇幅原因,写在这里PCG基本操作
C++ API
UPCGSpatialData
空间数据(UPCGSpatialData)是PCG框架中最基础的数据类型,它是所有具体空间数据的基类。具体子类可以实现采样,投影这些功能。
// 基本空间数据类定义
UCLASS(Abstract, BlueprintType, ClassGroup = (Procedural))
class PCG_API UPCGSpatialData : public UPCGData
{
// 获取数据维度
virtual int GetDimension() const PURE_VIRTUAL(UPCGSpatialData::GetDimension, return 0;);
// 获取边界
virtual FBox GetBounds() const PURE_VIRTUAL(UPCGSpatialData::GetBounds, return FBox(EForceInit::ForceInit););
// 计算位置密度
virtual float GetDensityAtPosition(const FVector& InPosition) const;
// 转换为点数据
virtual const UPCGPointData* ToPointData(FPCGContext* Context) const;
}数据表示
- 所有空间数据都可以转换为点数据(带有元数据和变换)
- 支持不同维度的数据(通过
GetDimension()函数)
空间属性
- 边界计算:
GetBounds()- 获取包括密度衰减的完整边界 - 严格边界:
GetStrictBounds()- 获取密度始终为1的边界区域 - 法线方向:
GetNormal()- 获取表面法线或体积的投影轴
- 边界计算:
数据操作
- 密度计算:
GetDensityAtPosition()- 计算给定位置的密度 - 点转换:
ToPointData()- 将数据离散化为点 - 点采样:
SamplePoint()- 在查询位置采样旋转、缩放和其他属性
- 密度计算:
空间运算
- 投影(Projection):
ProjectOn()- 将数据投影到其他数据上 - 交集(Intersection):
IntersectWith()- 计算与其他数据的交集 - 并集(Union):
UnionWith()- 计算与其他数据的并集 - 差集(Difference):
Subtract()- 计算与其他数据的差集
- 投影(Projection):
UPCGPointData(点数据)
点数据(UPCGPointData)是最基本的具体数据类型,继承自UPCGSpatialData。它代表了空间中的离散点集合,每个点都可以包含位置、旋转、缩放等信息。
// 点数据类定义
UCLASS(BlueprintType, ClassGroup = (Procedural))
class PCG_API UPCGPointData : public UPCGSpatialData
{
// 基本操作
virtual int GetDimension() const override { return 0; }
virtual FBox GetBounds() const override;
// 点操作
void SetPoints(const TArray<FPCGPoint>& InPoints);
FPCGPoint GetPoint(int32 Index);
int32 GetNumPoints();
bool IsEmpty();
}数据结构
- 使用
TArray<FPCGPoint>存储点数据 - 使用八叉树(Octree)进行空间索引
- 支持点的元数据管理
- 使用
空间优化
- 实现了八叉树结构(
PointOctree)用于空间查询优化 - 每个叶节点最多存储16个元素
- 树的最大深度为12层
- 实现了八叉树结构(
点操作
- 点的获取:
GetPoint() - 点的设置:
SetPoints() - 点的复制:
CopyPointsFrom() - 支持从Actor初始化点:
InitializeFromActor()
- 点的获取:
数据查询
- 获取点数量:
GetNumPoints() - 检查是否为空:
IsEmpty() - 获取边界:
GetBounds() - 支持点采样:
SamplePoint()
- 获取点数量:
特殊功能
- 支持点数据的投影:
ProjectPoint() - 支持元数据扁平化:
Flatten() - 支持边界重计算:
RecomputeBounds()
- 支持点数据的投影:
UPCGParamData(参数数据)
参数数据(UPCGParamData)是一个特殊的数据类型,用于在PCG图中存储和传递执行参数。它直接继承自UPCGData,主要用于节点间的参数传递。
// 参数数据类定义
UCLASS(BlueprintType, ClassGroup = (Procedural), DisplayName = "PCGAttribute Set")
class PCG_API UPCGParamData : public UPCGData
{
// 基本操作
virtual EPCGDataType GetDataType() const override { return EPCGDataType::Param; }
// 元数据操作
virtual const UPCGMetadata* ConstMetadata() const override;
virtual UPCGMetadata* MutableMetadata() override;
// 参数查找和管理
int64 FindMetadataKey(const FName& InName) const;
int64 FindOrAddMetadataKey(const FName& InName);
UPCGParamData* FilterParamsByName(FPCGContext* Context, const FName& InName) const;
UPCGParamData* FilterParamsByKey(FPCGContext* Context, int64 InKey) const;
}基本功能
- 存储执行参数
- 管理节点间的参数传递
- 支持参数的过滤和查找
数据管理
- 使用
TMap<FName, int64>进行名称映射 - 支持元数据的读写访问
- 提供参数复制和过滤功能
- 使用
参数操作
- 按名称查找:
FindMetadataKey() - 查找或添加:
FindOrAddMetadataKey() - 按名称过滤:
FilterParamsByName() - 按键值过滤:
FilterParamsByKey()
- 按名称查找:
特殊特性
- 支持属性选择器缓存
- 提供元数据的常量和可变访问
- 支持参数数据的复制
自定义节点(C++)
类型配置
- 设置输入类型:
// 配置多个输入Pin
TArray<FPCGPinProperties> InputPinProperties() const
{
TArray<FPCGPinProperties> PinProperties;
// Add required source pin
FPCGPinProperties& PinPropertiesSource =
PinProperties.Emplace_GetRef(PCGDifferenceConstants::SourceLabel,
EPCGDataType::Spatial);
PinPropertiesSource.SetRequiredPin();
// Add optional differences pin
FPCGPinProperties& PinPropertiesDifferences =
PinProperties.Emplace_GetRef(PCGDifferenceConstants::DifferencesLabel,
EPCGDataType::Spatial);
return PinProperties;
}
// 支持多种类型输入
TArray<FPCGPinProperties> InputPinProperties() const
{
TArray<FPCGPinProperties> PinProperties;
// Support both point and param data
PinProperties.Emplace_GetRef(PCGPinConstants::DefaultInputLabel,
EPCGDataType::PointOrParam).SetRequiredPin();
return PinProperties;
}- 设置输出类型:
// 多输出Pin配置
TArray<FPCGPinProperties> OutputPinProperties() const
{
TArray<FPCGPinProperties> Properties;
// Define multiple output pins for different purposes
Properties.Emplace(PCGRandomChoiceSettingsTest::ChosenPointsLabel,
EPCGDataType::Point);
Properties.Emplace(PCGRandomChoiceSettingsTest::DiscardedPointsLabel,
EPCGDataType::Point);
Properties.Emplace(PCGRandomChoiceSettingsTest::ResultsLabel,
EPCGDataType::Param);
return Properties;
}EPCGDataType
上面用到这个EPCGDataType 是一个位掩码枚举,使用位运算来组合不同的类型
点击查看EPCGDataType 详情
UENUM(meta = (Bitflags))
enum class EPCGDataType : uint32
{
None = 0 UMETA(Hidden),
Point = 1 << 1,
Spline = 1 << 2,
LandscapeSpline = 1 << 3,
PolyLine = Spline | LandscapeSpline UMETA(DisplayName = "Curve"),
Landscape = 1 << 4,
Texture = 1 << 5,
RenderTarget = 1 << 6,
BaseTexture = Texture | RenderTarget UMETA(Hidden),
Surface = Landscape | BaseTexture,
Volume = 1 << 7,
Primitive = 1 << 8,
DynamicMesh = 1 << 10,
/** Simple concrete data. */
Concrete = Point | PolyLine | Surface | Volume | Primitive | DynamicMesh,
/** Boolean operations like union, difference, intersection. */
Composite = 1 << 9 UMETA(Hidden),
/** Combinations of concrete data and/or boolean operations. */
Spatial = Composite | Concrete,
Param = 1 << 27 UMETA(DisplayName = "Attribute Set"),
// Combination of Param and Point, necessary for named-based serialization of enums.
PointOrParam = Point | Param,
Settings = 1 << 28 UMETA(Hidden),
Other = 1 << 29,
Any = (1 << 30) - 1
};PCG类型 bitmask
- 基础
None = 0 // 空类型
Point = 1 << 1 // 点类型,表示3D空间中的单个点- 样条线
Spline = 1 << 2 // 样条曲线
LandscapeSpline = 1 << 3 // 地形样条曲线
PolyLine = Spline | LandscapeSpline // 曲线(包含普通样条和地形样条)- 表面和纹理相关类型:
Landscape = 1 << 4 // 地形
Texture = 1 << 5 // 纹理
RenderTarget = 1 << 6 // 渲染目标
BaseTexture = Texture | RenderTarget // 基础纹理(包含纹理和渲染目标)
Surface = Landscape | BaseTexture // 表面(包含地形和基础纹理)- 几何体
Volume = 1 << 7 // 体积
Primitive = 1 << 8 // 图元
DynamicMesh = 1 << 10 // 动态网格- 高级类型
Concrete = Point | PolyLine | Surface | Volume | Primitive | DynamicMesh
// 具体数据类型,包含所有基本几何类型
Composite = 1 << 9 // 用于布尔运算(如并集、差集、交集)
Spatial = Composite | Concrete
// 空间数据,包含具体几何数据和布尔运算结果
Param = 1 << 27 // 属性集
PointOrParam = Point | Param // 点或属性集(用于基于名称的枚举序列化)
Settings = 1 << 28 // 设置
Other = 1 << 29 // 其他类型
Any = (1 << 30) - 1 // 任意类型(所有位都设为1)使用bitmask
- 可以轻易判断包含的类型数据。
位置: 87654321
二进制: 11110010
↓↓↓↓↓↓↓↓
│││││││└─ 0: None
││││││└── 1: Point
│││││└─── 0: Spline
││││└──── 0: LandscapeSpline
│││└───── 1: Landscape
││└────── 1: Texture
│└─────── 1: RenderTarget
└──────── 1: Volume这个组合包含了 Point + Landscape + Texture + RenderTarget + Volume
- 要检查一个类型是否是 Concrete 类型,我们需要使用"与"运算符
&:
bool isConcrete = (someType & Concrete) == someType;社区示例 NativeRandomChoice
这是一份来自社区的示例,用于随机选择一定数量或比例的点。
节点设置类(Settings)
UCLASS(BlueprintType)
class UPCGRandomChoiceTest : public UPCGSettings
{
GENERATED_BODY()
public:
// 节点基本信息
#if WITH_EDITOR
virtual FName GetDefaultNodeName() const override { return FName(TEXT("NativeRandomChoice")); }
virtual FText GetDefaultNodeTitle() const override { return NSLOCTEXT("PCGRandomChoiceSettings", "NodeTitle", "Native Random Choice"); }
virtual FText GetNodeTooltipText() const override { return NSLOCTEXT("PCGRandomChoiceSettings", "NodeTooltip", "Split a point input in 2, randomly according to a ratio."); }
virtual EPCGSettingsType GetType() const override { return EPCGSettingsType::Sampler; }
#endif
// 输入输出Pin定义
virtual TArray<FPCGPinProperties> InputPinProperties() const override { return Super::DefaultPointInputPinProperties(); }
virtual TArray<FPCGPinProperties> OutputPinProperties() const override;
// 节点设置参数
UPROPERTY(BlueprintReadWrite, EditAnywhere, Category = "Settings", meta = (PCG_Overridable))
bool bFixedMode = false;
UPROPERTY(BlueprintReadWrite, EditAnywhere, Category = "Settings", meta = (PCG_Overridable, ClampMin = 0.0, ClampMax = 1.0, EditCondition = "!bFixedMode", EditConditionHides))
float Ratio = 0.1f;
UPROPERTY(BlueprintReadWrite, EditAnywhere, Category = "Settings", meta = (PCG_Overridable, ClampMin = 1, EditCondition = "bFixedMode", EditConditionHides))
int32 FixedNumber = true;
};执行类(Element)
class FPCGRandomChoiceTestElement : public IPCGElement
{
protected:
virtual bool ExecuteInternal(FPCGContext* Context) const override;
};实现细节
- 输出Pin定义
TArray<FPCGPinProperties> UPCGRandomChoiceTest::OutputPinProperties() const
{
TArray<FPCGPinProperties> Properties;
// 定义3个输出Pin:选中的点、未选中的点、结果参数
Properties.Emplace(PCGRandomChoiceSettingsTest::ChosenPointsLabel, EPCGDataType::Point);
Properties.Emplace(PCGRandomChoiceSettingsTest::DiscardedPointsLabel, EPCGDataType::Point);
Properties.Emplace(PCGRandomChoiceSettingsTest::ResultsLabel, EPCGDataType::Param);
return Properties;
}- 数据处理流程
bool FPCGRandomChoiceTestElement::ExecuteInternal(FPCGContext* Context) const
{
check(Context);
const UPCGRandomChoiceTest* Settings = Context->GetInputSettings<UPCGRandomChoiceTest>();
check(Settings);
//在上下文里获取该节点的用户配置
TArray<FPCGTaggedData>& Outputs = Context->OutputData.TaggedData;
//使用默认输入标签获取输入数据
for (const FPCGTaggedData& Input : Context->InputData.GetInputsByPin(PCGPinConstants::DefaultInputLabel))
{
const UPCGPointData* PointData = Cast<UPCGPointData>(Input.Data);
if (!PointData)
{
//输入不是点数据, 进入下一个
PCGE_LOG(Error, GraphAndLog, LOCTEXT("InputNotPointData", "Input is not a point data"));
continue;
}
const TArray<FPCGPoint>& InPoints = PointData->GetPoints();
// 计算要保留的点数量
int32 NumberOfElementsToKeep = 0;
if (!Settings->bFixedMode)
{
float Ratio = FMath::Clamp(Settings->Ratio, 0.0f, 1.0f);
NumberOfElementsToKeep = FMath::CeilToInt(Ratio * InPoints.Num());
}
else
{
NumberOfElementsToKeep = FMath::Clamp(Settings->FixedNumber, 1, InPoints.Num() - 1);
}
// 创建输出Pin:ChosenPoints 和 DiscardedPoints
UPCGPointData* ChosenPointsData = NewObject<UPCGPointData>();
ChosenPointsData->InitializeFromData(PointData);
TArray<FPCGPoint>& ChosenPoints = ChosenPointsData->GetMutablePoints();
ChosenPoints.Reserve(NumberOfElementsToKeep);
UPCGPointData* DiscardedPointsData = NewObject<UPCGPointData>();
DiscardedPointsData->InitializeFromData(PointData);
TArray<FPCGPoint>& DiscardedPoints = DiscardedPointsData->GetMutablePoints();
DiscardedPoints.Reserve(InPoints.Num() - NumberOfElementsToKeep);
// 随机选择点
TArray<int32> Indexes;
for (int32 i = 0; i < InPoints.Num(); i++)
{
Indexes.Add(i);
}
FMath::Shuffle(Indexes);
// 分配点到不同输出
for (int32 i = 0; i < NumberOfElementsToKeep; i++)
{
ChosenPoints.Add(InPoints[Indexes[i]]);
}
for (int32 i = NumberOfElementsToKeep; i < InPoints.Num(); i++)
{
DiscardedPoints.Add(InPoints[Indexes[i]]);
}
//添加到 Outputs Pin,注意:新创建的FPCGTaggedData是以Input为模板创建的。
FPCGTaggedData& ChosenTaggedData = Outputs.Add_GetRef(Input);
ChosenTaggedData.Data = ChosenPointsData;
ChosenTaggedData.Pin = PCGRandomChoiceSettingsTest::ChosenPointsLabel;
FPCGTaggedData& DiscardedTaggedData = Outputs.Add_GetRef(Input);
DiscardedTaggedData.Data = DiscardedPointsData;
DiscardedTaggedData.Pin = PCGRandomChoiceSettingsTest::DiscardedPointsLabel;
// 添加一个ParamData作为结果输出, 也就是第三个参数
UPCGParamData* ParamData = NewObject<UPCGParamData>();
FPCGMetadataAttribute<int32>* Attribute = ParamData->Metadata->CreateAttribute<int32>(
TEXT("ChosenPointsNum"), NumberOfElementsToKeep, true, true);
Attribute->SetValue(ParamData->Metadata->AddEntry(), NumberOfElementsToKeep);
FPCGTaggedData& ResultsTaggedData = Outputs.Add_GetRef(Input);
ResultsTaggedData.Data = ParamData;
ResultsTaggedData.Pin = PCGRandomChoiceSettingsTest::ResultsLabel;
}
return true;
}官方示例
社区版非常简洁粗暴,浅显易懂。PCG在UE5.5里也实现了一个官方版,有种非常文绉绉的工业感
- 更严谨的输入处理
// Support both point data and param data, using EPCGDataType::PointOrParam
TArray<FPCGPinProperties> UPCGRandomChoiceSettings::InputPinProperties() const
{
TArray<FPCGPinProperties> PinProperties;
// SetRequiredPin() marks this pin as mandatory
PinProperties.Emplace_GetRef(PCGPinConstants::DefaultInputLabel, EPCGDataType::PointOrParam).SetRequiredPin();
return PinProperties;
}- 独立的数据选择函数
namespace PCGRandomChoice
{
// Specialized function for point data selection
// Using TArrayView for efficient array passing without copying
UPCGData* ChoosePointData(const UPCGData* InData, TArrayView<int32> InIndexes, FPCGContext* InContext)
{
const UPCGPointData* InPointData = CastChecked<const UPCGPointData>(InData);
// Create new object in any thread context
UPCGPointData* OutPointData = FPCGContext::NewObject_AnyThread<UPCGPointData>(InContext);
OutPointData->InitializeFromData(InPointData);
const TArray<FPCGPoint>& InPoints = InPointData->GetPoints();
TArray<FPCGPoint>& OutPoints = OutPointData->GetMutablePoints();
OutPoints.Reserve(InIndexes.Num());
// Sort indexes to maintain stable output order
// This ensures consistent results regardless of random selection
Algo::Sort(InIndexes);
for (int32 Index : InIndexes)
{
OutPoints.Add(InPoints[Index]);
}
return OutPointData;
}
// Specialized function for param data selection
// Similar pattern but handles metadata entries instead of points
UPCGData* ChooseParamData(const UPCGData* InData, TArrayView<int32> InIndexes, FPCGContext* InContext)
{
const UPCGParamData* InParamData = CastChecked<const UPCGParamData>(InData);
UPCGParamData* OutParamData = FPCGContext::NewObject_AnyThread<UPCGParamData>(InContext);
// Keep stable order for metadata entries
Algo::Sort(InIndexes);
// Transform indexes to metadata entry keys
TArray<PCGMetadataEntryKey> SelectedEntries;
Algo::Transform(InIndexes, SelectedEntries, [](int32 In) -> PCGMetadataEntryKey { return In; });
// Initialize as a partial copy with only selected entries
OutParamData->Metadata->InitializeAsCopy(InParamData->Metadata, &SelectedEntries);
return OutParamData;
}
}- 更高效的随机化算法
// Partial shuffle algorithm: only shuffle the elements we need
// This is more efficient than shuffling the entire array when we only need a small portion
for (int j = 0; j < NumOfElementsToKeep; ++j)
{
// Only randomize within the remaining range
const int RandomElement = RandStream.RandRange(j, NumElements - 1);
if (RandomElement != j)
{
Swap(ShuffledIndexes[j], ShuffledIndexes[RandomElement]);
}
}- 边界情况处理
if (NumOfElementsToKeep == 0)
{
// Special case: no elements to keep
// Forward original input to Discarded and create empty data for Chosen
if (Settings->bOutputDiscardedEntries)
{
// Use input as template for discarded output
FPCGTaggedData& DiscardedOutput = Outputs.Add_GetRef(CurrentInput);
DiscardedOutput.Pin = PCGRandomChoiceConstants::DiscardedEntriesLabel;
}
// Create empty data for chosen output
FPCGTaggedData& ChosenOutput = Outputs.Add_GetRef(CurrentInput);
ChosenOutput.Data = ChooseFunc(CurrentInput.Data, {}, Context);
ChosenOutput.Pin = PCGRandomChoiceConstants::ChosenEntriesLabel;
continue;
}
else if (NumOfElementsToKeep == NumElements)
{
// Special case: keep all elements
// Forward original input to Chosen and create empty data for Discarded
FPCGTaggedData& ChosenOutput = Outputs.Add_GetRef(CurrentInput);
ChosenOutput.Pin = PCGRandomChoiceConstants::ChosenEntriesLabel;
if (Settings->bOutputDiscardedEntries)
{
// Create empty data for discarded output
FPCGTaggedData& DiscardedOutput = Outputs.Add_GetRef(CurrentInput);
DiscardedOutput.Data = ChooseFunc(CurrentInput.Data, {}, Context);
DiscardedOutput.Pin = PCGRandomChoiceConstants::DiscardedEntriesLabel;
}
continue;
}节点分析
如图,Difference节点的连接点(Pin) 和其他节点很不一样,前面讨论过,这种类型的输入节点类型,是个UPCGSpatialData父类, 他处理数据的方式,值得探究。 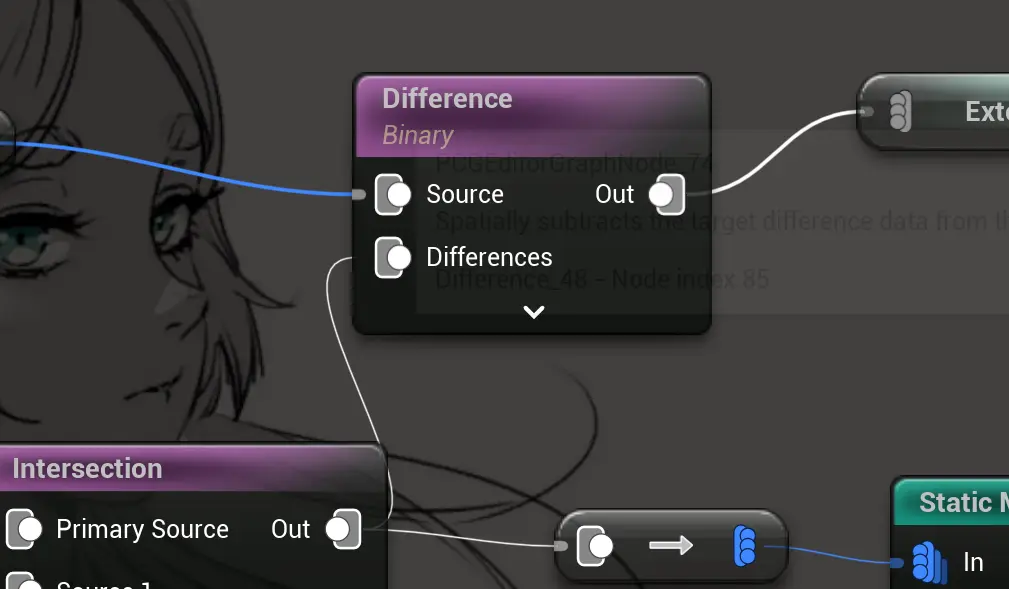
Difference
Difference节点是PCG系统中的一个空间操作类型节点,其主要功能是从源数据中空间性地减去目标差异数据。它的特别之处在于对输入数据的处理方式:源数据支持多输入迭代,而差异数据会被自动合并(Union)后再进行减法操作。
带着问题来探究:
- 他的输入数据没有针对直接子类,都是UPCGSpatialData,不同类型是如何整合处理?
答:从源码中可以看到,Difference节点通过以下方式处理不同类型的空间数据:
- 类型检查和分发:
// 对非空间数据的处理
if (!SourceSpatialData)
{
Outputs.Add(Source); // 直接传递到输出
continue;
}
// 记录数据类型信息,用于自动推断 源数据是否包含点数据
bHasPointsInSource |= SourceSpatialData->IsA<UPCGPointData>();- 统一的数据接口:通过
UPCGDifferenceData类提供了统一的数据处理接口:
void UPCGDifferenceData::Initialize(const UPCGSpatialData* InData)
{
Source = InData;
TargetActor = InData->TargetActor;
Metadata->Initialize(Source->Metadata);
}- 智能Union处理:对于多个差异数据,会自动创建Union:
if (!DifferencesUnion)
{
DifferencesUnion = FPCGContext::NewObject_AnyThread<UPCGUnionData>(InContext);
DifferencesUnion->AddData(Difference);
DifferencesUnion->SetDensityFunction(PCGDifferenceDataUtils::ToUnionDensityFunction(DensityFunction));
Difference = DifferencesUnion;
}所以,它是把全部差异数据进行了合并,然后再进行差异操作。每个源数据都要进行对比。
- 空间的差异操作,不同类型会有怎样的结果?比如点和体积的差异结果是什么?
答:差异操作的结果取决于以下因素:
- 输出模式选择:
enum class EPCGDifferenceMode : uint8
{
Inferred, // 自动推断:根据输入数据类型自动选择合适的输出模式
Continuous, // 连续模式:保持数据的连续性,适合处理体积、密度等连续数据
Discrete // 离散模式:将结果转换为离散的点数据
};- 输出模式自动推断:
// 根据输入数据类型自动决定输出类型,这段代码的意思是:
//如果使用自动推断模式且源数据和差异数据都包含点数据,则输出为点数据
if ((Settings->Mode == EPCGDifferenceMode::Inferred &&
bHasPointsInSource && bHasPointsInDifferences))
{
Output.Data = DifferenceData->ToPointData(Context); // 转换为点数据
}- 边界检查优化:
// 如果差异数据与源数据没有重叠,直接跳过处理
if (!GetBounds().Intersect(InDifference->GetBounds()))
{
return;
}- 元数据处理:
// 可以选择是否处理元数据
bool bDiffMetadata = true; // 默认处理元数据
bool bKeepZeroDensityPoints = false; // 默认移除密度为0的点PGC 并行(C++)
上面的官方随机选择代码里,用到了:
UPCGPointData* OutPointData = FPCGContext::NewObject_AnyThread<UPCGPointData>(InContext);说明PCG是由多线程考虑的。
常见的并行处理,是使用引擎core里面的Aync方法 ParallelFor:
// 使用并行处理来设置属性值
ParallelFor(AttributeCountInCurrentDispatch, [&](int32 WorkerIndex) {
FPCGMetadataAttributeBase* Attribute = AttributesToSet[AttributeOffset + WorkerIndex];
Attribute->SetValuesFromValueKeys(Values, false);
});如图,调用的地方还挺多,但不是主要用法。 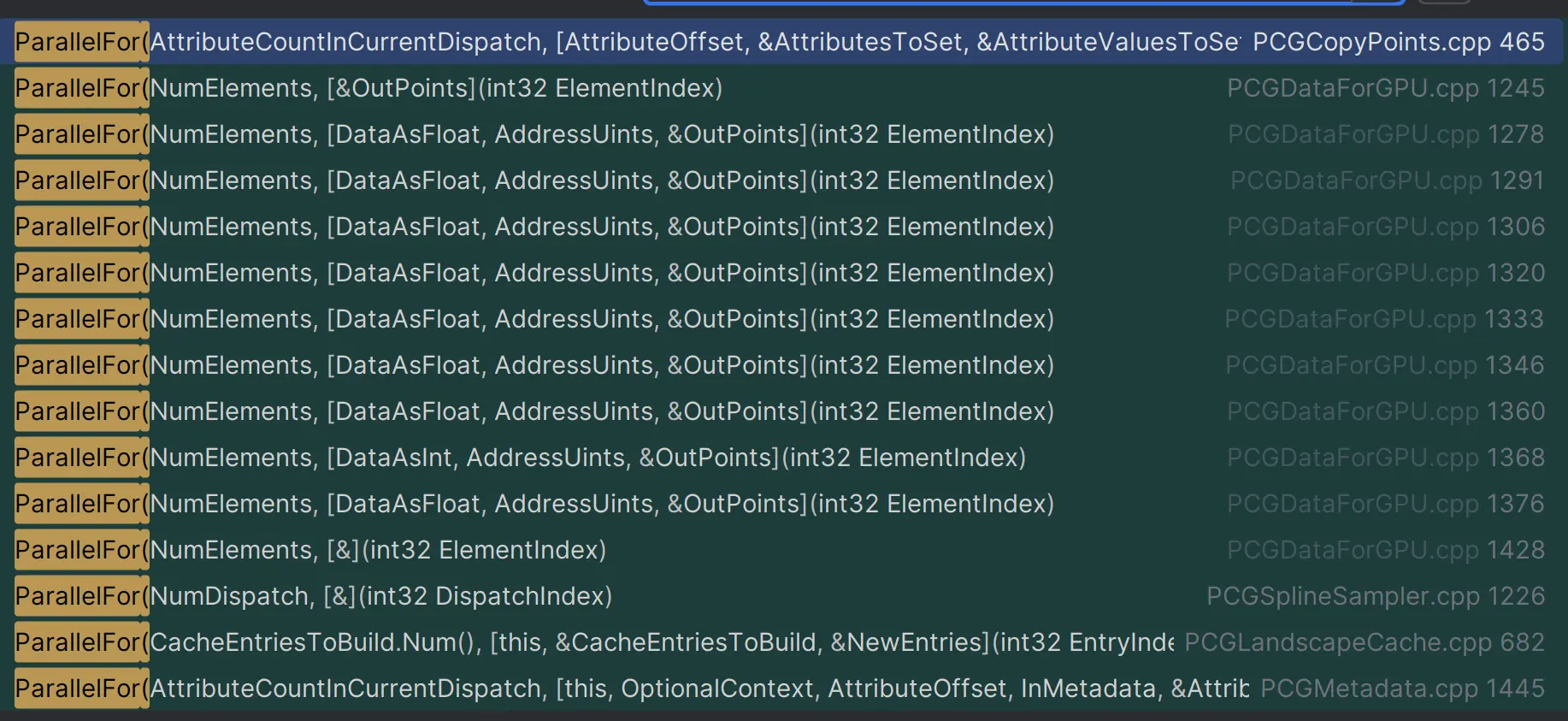
最主要的并行方法,是由PCGAsync来实现的:
\UnrealEngine\Engine\Plugins\PCG\Source\PCG\Private\Helpers\PCGAsync.cpp
以下内容是AI分析(没时间细看了,凑合用吧):
PCG多线程支持
一个PCG节点是否可以多线程执行主要取决于以下几个因素:
CanExecuteOnlyOnMainThread函数:
- 如果节点没有重写这个函数,默认继承自IPCGElement的实现
- 如果节点重写了这个函数并返回true,则表示该节点必须在主线程上执行
- 如果返回false,则表示该节点可以在任何线程上执行
NewObject_AnyThread的使用:
- 如果节点在创建UObject时使用NewObject_AnyThread而不是普通的NewObject,说明它支持多线程执行
- 在PCGRandomChoice中,我们可以看到它使用了FPCGContext::NewObject_AnyThread来创建数据对象
1. 并行处理的两个层次
PCG系统实现了两个层次的并行处理机制:
- 节点级别的并行(通过ExecutionLoopMode)
- 数据级别的并行(通过AsyncPointProcessing)
1.1 节点级别并行(ExecutionLoopMode)
节点级别并行通过EPCGElementExecutionLoopMode枚举来控制:
enum EPCGElementExecutionLoopMode : uint8
{
NotALoop, // 非循环操作
SinglePrimaryPin, // 在单个必需的输入引脚上循环
MatchingPrimaryPins, // 在多个必需的输入引脚上匹配索引循环
// CartesianPins // 在输入引脚上进行笛卡尔积循环(TODO)
};示例:PCGAttributeReduceElement
EPCGElementExecutionLoopMode FPCGAttributeReduceElement::ExecutionLoopMode(const UPCGSettings* InSettings) const
{
const UPCGAttributeReduceSettings* Settings = Cast<const UPCGAttributeReduceSettings>(InSettings);
return (!Settings || !Settings->bMergeOutputAttributes) ?
EPCGElementExecutionLoopMode::SinglePrimaryPin :
EPCGElementExecutionLoopMode::NotALoop;
}这个例子展示了:
- 当
bMergeOutputAttributes为false时,使用SinglePrimaryPin模式 - PCG系统可以对每个输入引脚的数据并行处理
- 每个输入数据可以独立计算其属性的归约(reduction)操作
1.2 数据级别并行(AsyncPointProcessing)
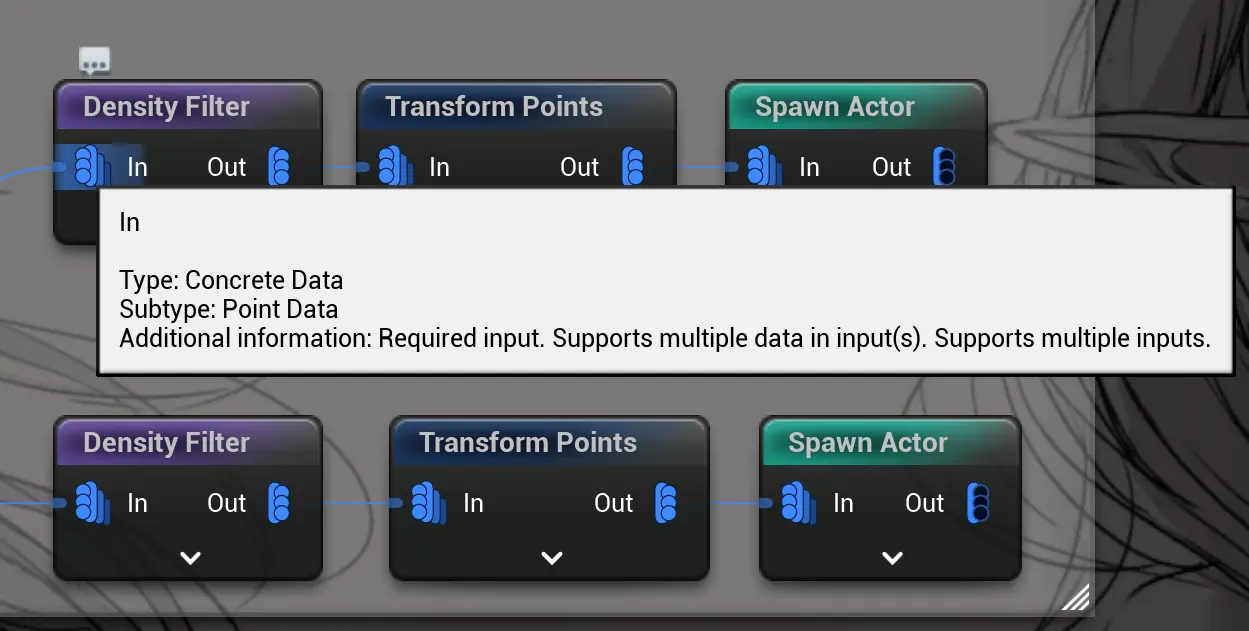
数据级别并行通过FPCGAsync::AsyncPointProcessing函数实现。
从搜索结果可以看到,很多PCG节点都使用了AsyncPointProcessing:
- PCGCreatePoints:创建点云
- PCGDensityFilter:密度过滤
- PCGTransformPoints:点变换
- PCGSampleTexture:纹理采样
- PCGSelectPoints:点选择
示例:PCGCreatePoints
FPCGAsync::AsyncPointProcessing(Context, PointsToLoopOn.Num(), OutputPoints,
[&PointsToLoopOn, &LocalTransform, CullingShape](int32 Index, FPCGPoint& OutPoint)
{
const FPCGPoint& InPoint = PointsToLoopOn[Index];
OutPoint = InPoint;
OutPoint.Transform *= LocalTransform;
const int SeedFromPosition = UPCGBlueprintHelpers::ComputeSeedFromPosition(
OutPoint.Transform.GetLocation());
OutPoint.Seed = (InPoint.Seed == 0 ?
SeedFromPosition :
PCGHelpers::ComputeSeed(InPoint.Seed, SeedFromPosition));
// 剔除体积外的点
return !CullingShape || (CullingShape->GetDensityAtPosition(
OutPoint.Transform.GetLocation()) > 0.0f);
});