PCG Union And Difference
PCG 中, Union和Difference节点的密度函数是非常晦涩的部分,没有官方文档只有代码; 这里记录一下我自己的研究。
Union
Union在中文里常见的翻译为并集,或者联合。无论中英文,名字表达的意思和它所作的事情充满了歧义和误导。并集是数学上的概念,合并两个集合,得到一个更大的集合。但PCG中的Union,由于密度函数的存在,它更像是在做“排除”,两个接入的点可能会出来1个。
如果需要“并集”,来获得合并进来全部点, 最应该使用的是ToPoints节点或者 Merge Points节点。
Union 的真实意图是“融并”
step1 如果两个点有重合部分(代码里是判断是否intersects)了,且两者的密度都不为零,那么密度函数就会起作用,来融并他们。否则不处理,直接返回原来的数据。
step2 既然是融合,如两个点变成一个点,那么必然需要有优先级,来决定保存谁,舍弃谁。Union提供了两种模式:数组的左到右,和右到左这两种模式。(这也是比较晦涩难搞的地方,光看节点的连接,是看不出左右;在编辑的时候,谁先连接谁就在数组的左边,一旦编辑过后,你就会忘了到底谁先谁后,目前PCG节点是看不出的,只能规范地连接节点,在上面的代表更先连接); 除了左右优先级,他还有个keep all模式,如果需要保留全部点,还不如用Merge Points节点。
step3 确定了保留谁后,开始计算融并后的密度,用Union节点配置的密度函数来计算。
而密度函数有3个模式:
Clamped Addition: 钳制加法, 就是相加,超过1设置为1
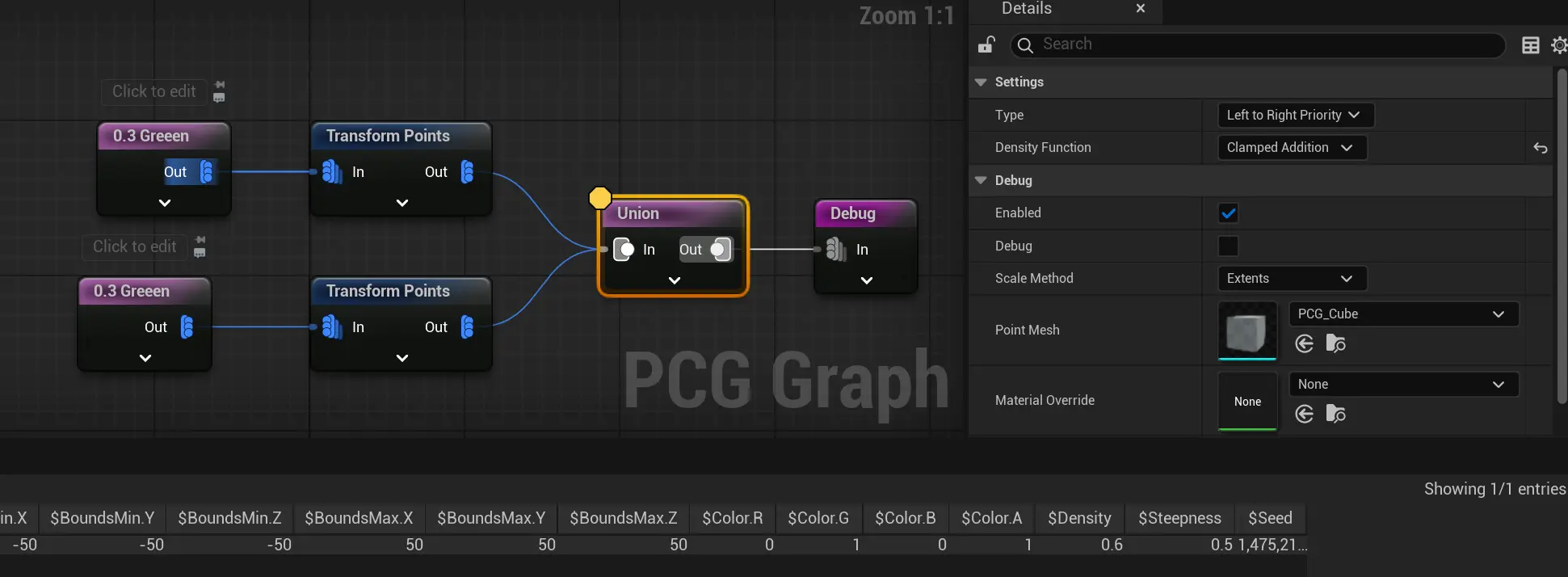 如图,创建两个有重叠部分的点,两个点的密度都是0.3,所以最终密度为0.6;钳制加法就是把两者的密度相加,但钳制在0-1之间。公式:
如图,创建两个有重叠部分的点,两个点的密度都是0.3,所以最终密度为0.6;钳制加法就是把两者的密度相加,但钳制在0-1之间。公式:FMath::Min(InDensityToUpdate + InOtherDensity, 1.0f);Maximum: 取最大值
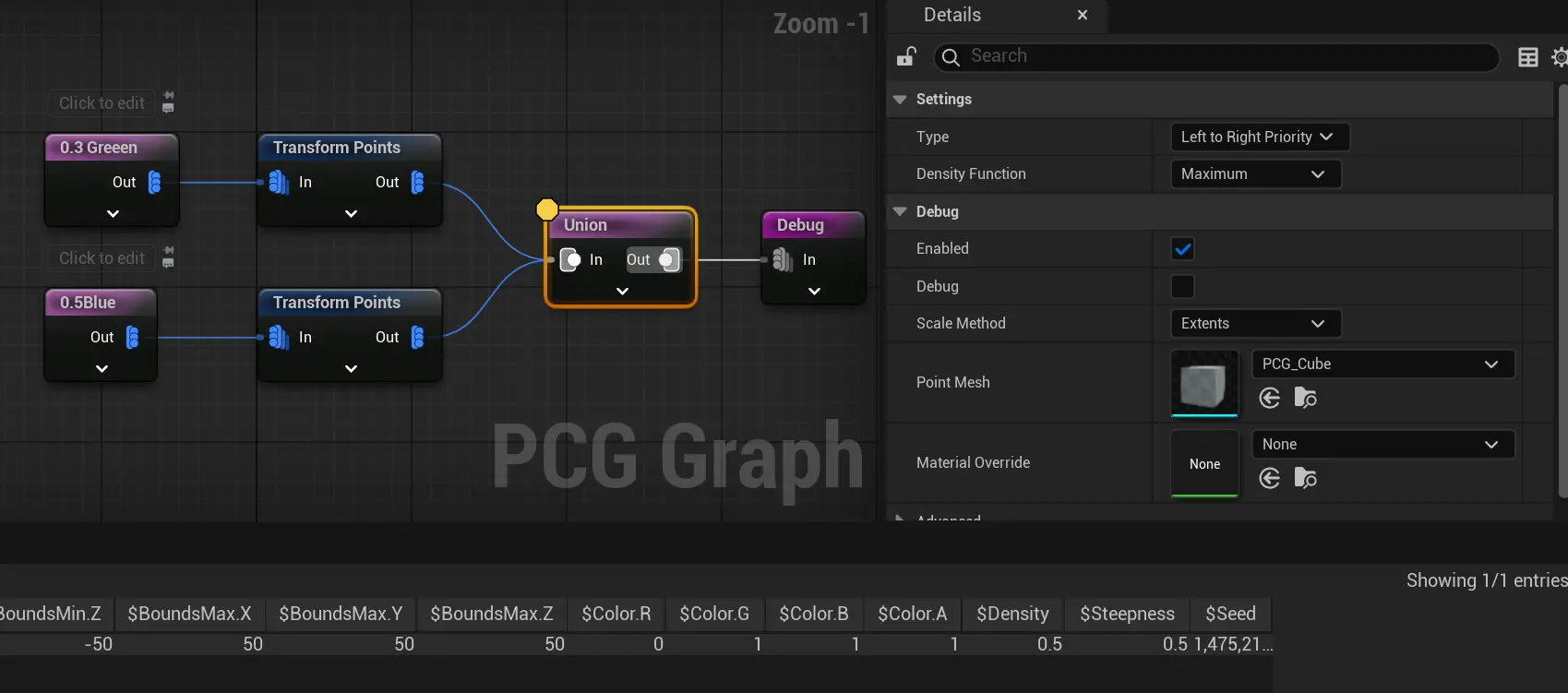 如图,此时保留的是密度较大的点 0.5,公式:
如图,此时保留的是密度较大的点 0.5,公式:FMath::Max(InDensityToUpdate, InOtherDensity);Binary: 二进制,非黑即白
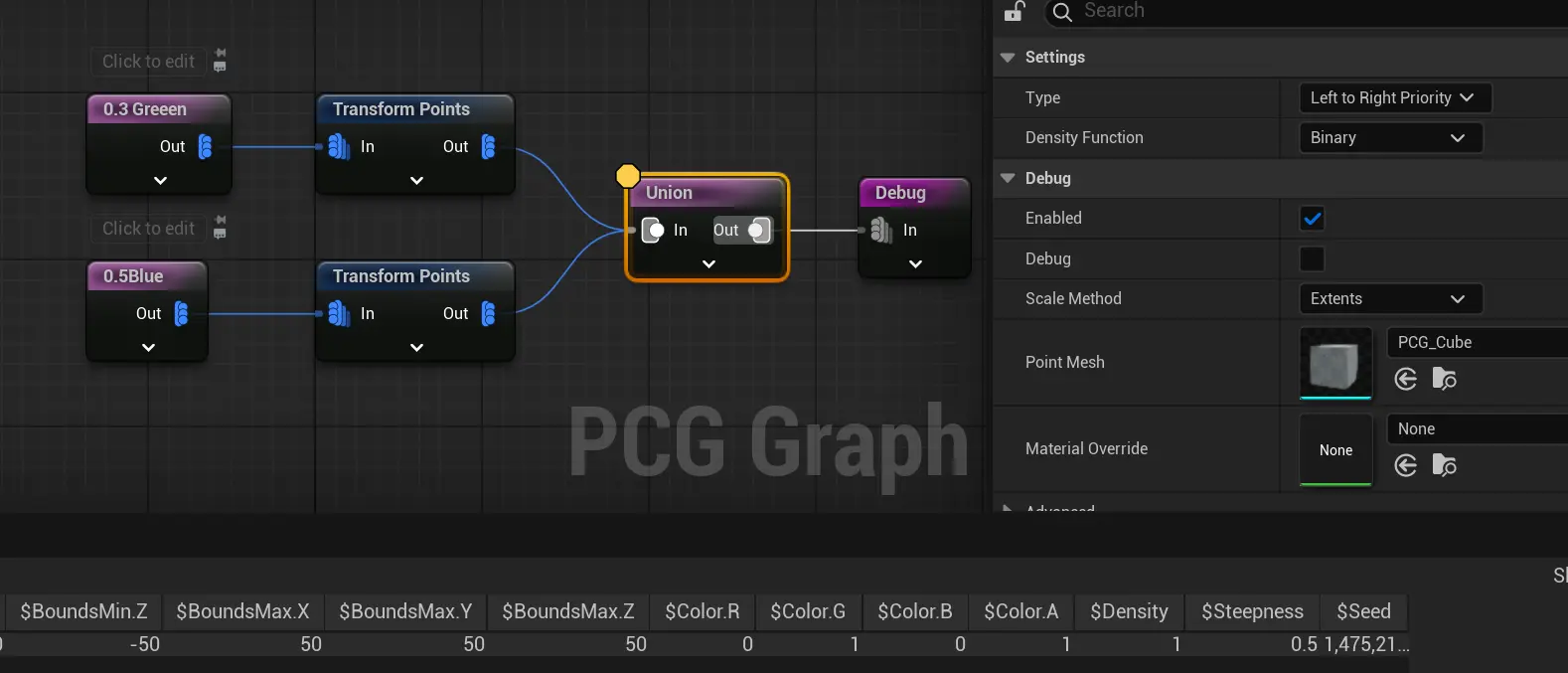 此时,只要密度大于零,就都设置为1,否则设置为0。公式:
此时,只要密度大于零,就都设置为1,否则设置为0。公式:(InOtherDensity > 0) ? 1.0f : InDensityToUpdate;
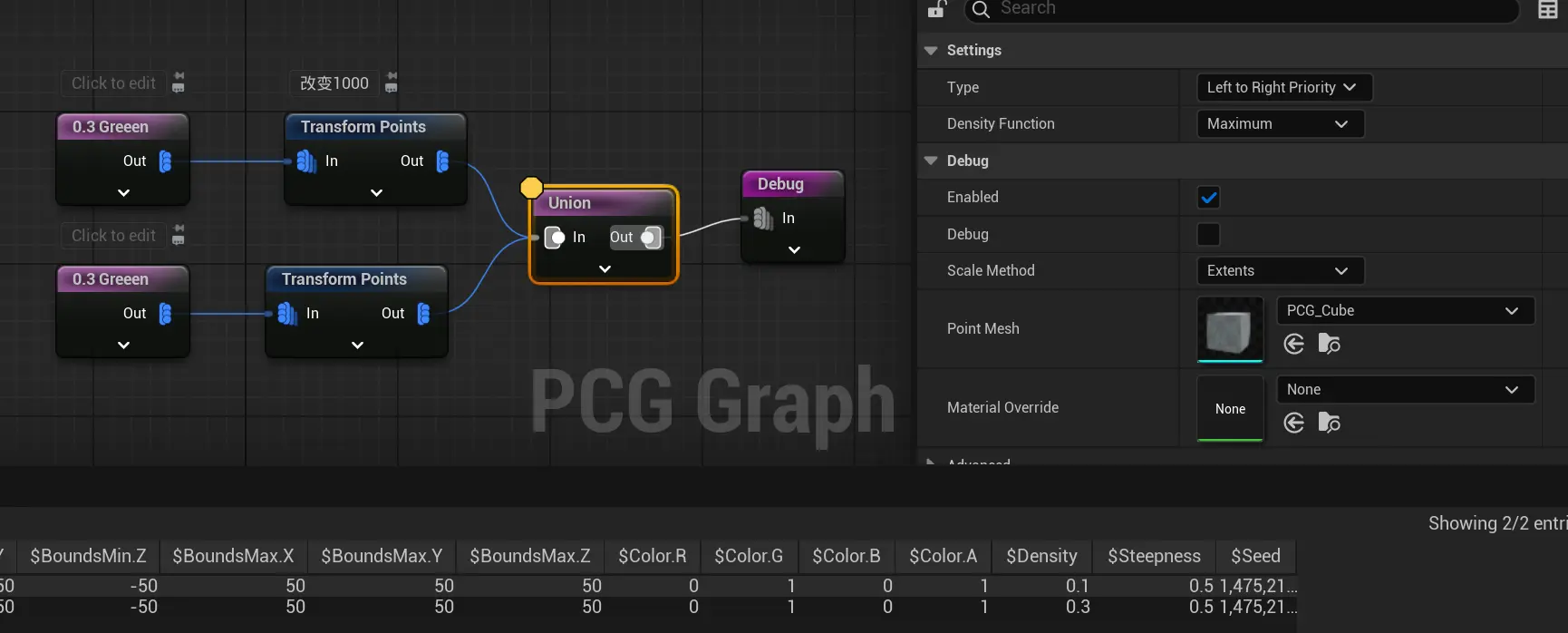 可以看到融并没有发生,数据原封不动。但此时改成 Binary 模式,数据还是会被改变的:
可以看到融并没有发生,数据原封不动。但此时改成 Binary 模式,数据还是会被改变的: 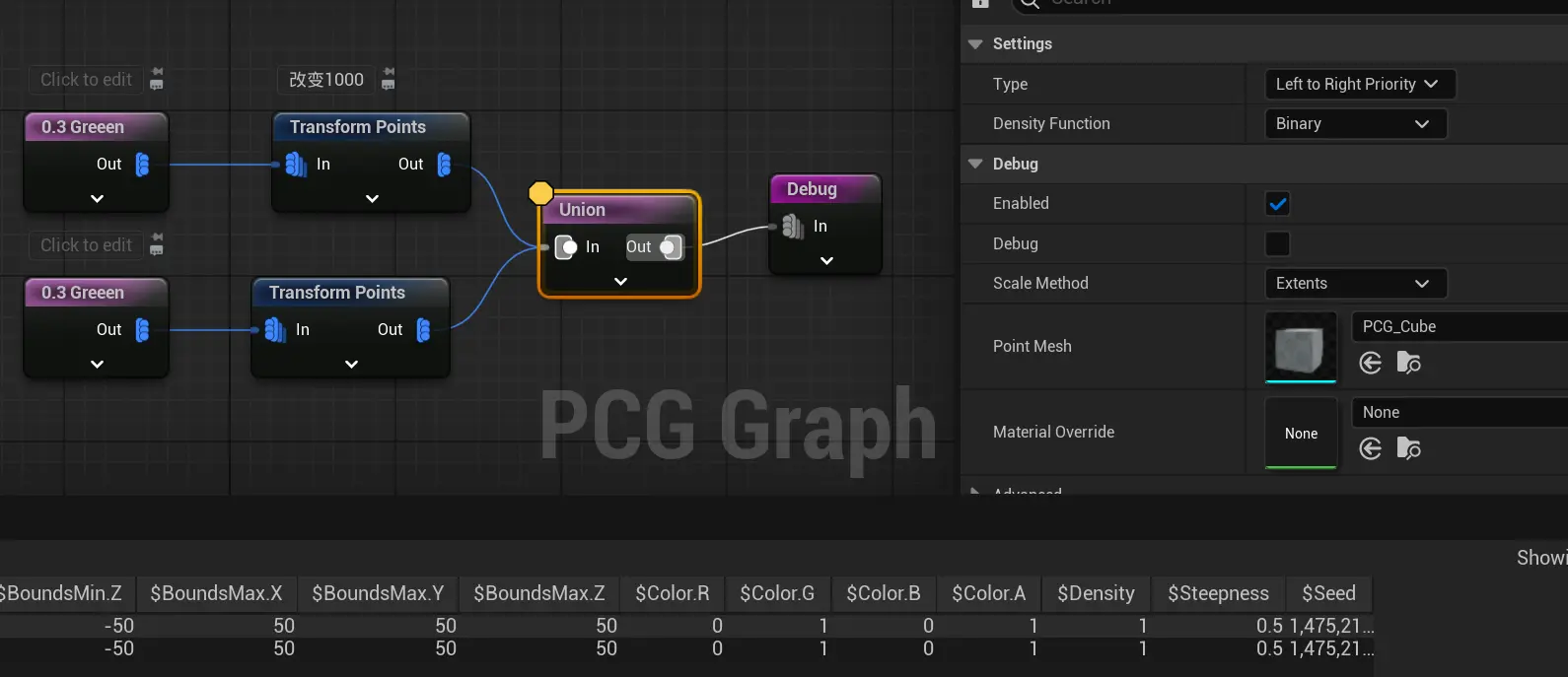
注意2
Union 不只是修改密度,还有Color和 其他元数据(Binary 模式除外)
修改颜色
成功融并的数据,颜色会取最大值,进行“变亮”操作(所有模式都是这个操作,无法配置)
(Binary模式下,只取优先级高的,不会修改其他数据)
代码:
OutPoint.Color = FVector4(
FMath::Max(OutPoint.Color.X, PointInData.Color.X),
FMath::Max(OutPoint.Color.Y, PointInData.Color.Y),
FMath::Max(OutPoint.Color.Z, PointInData.Color.Z),
FMath::Max(OutPoint.Color.W, PointInData.Color.W));测试案例里蓝 + 绿 变成了 这个颜色: 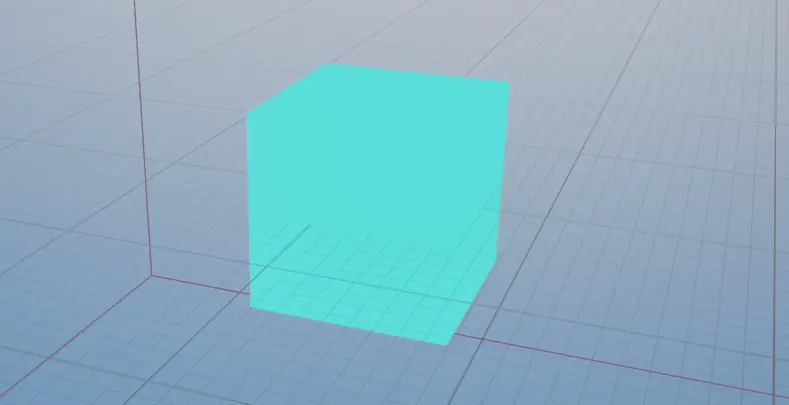
修改其他元数据
同样是取最大值或者直接赋值,无法配置其他操作,贴代码供参考:
// Merge properties into OutPoint
if (OutMetadata)
{
if (OutPoint.MetadataEntry != PCGInvalidEntryKey && PointInData.MetadataEntry != PCGInvalidEntryKey)
{
OutMetadata->MergePointAttributesSubset(OutPoint, OutMetadata, OutMetadata, PointInData, OutMetadata, DataRawPtr[DataIndex]->Metadata, OutPoint, EPCGMetadataOp::Max);
}
else if (PointInData.MetadataEntry != PCGInvalidEntryKey)
{
OutPoint.MetadataEntry = PointInData.MetadataEntry;
}
}Difference 差异节点
要理解Difference,需要先理解Union, 因为它是在Union的基础上做进一步计算的。 默认行为是排除重叠部分,和数学上的差集A-B有点像了,但还要有非常多的细节。
Difference 的两个PIN
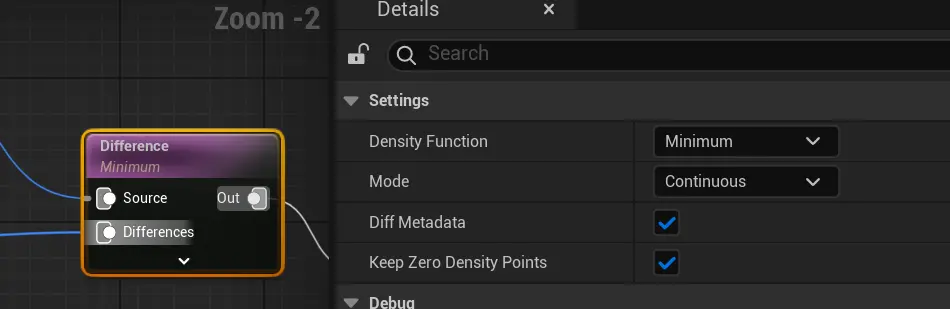
Source Pin 就是准备被减去的源,设为A;Difference Pin 其实就是一个内置的Union节点, 设为B。
所以,详情面板上的密度函数,主要是给该Union节点配置的。这里密度函数选中最小值,对应Union的最大值,相关代码:
namespace PCGDifferenceDataUtils
{
// 密度函数模式转换
EPCGUnionDensityFunction ToUnionDensityFunction(EPCGDifferenceDensityFunction InDensityFunction)
{
if (InDensityFunction == EPCGDifferenceDensityFunction::ClampedSubstraction)
{
return EPCGUnionDensityFunction::ClampedAddition;
}
else if (InDensityFunction == EPCGDifferenceDensityFunction::Binary)
{
return EPCGUnionDensityFunction::Binary;
}
else
{
return EPCGUnionDensityFunction::Maximum;
}
}
}之所以要这么做,是为了应对当B存在多个点的时候(重叠的点),只选出一个真正的话事人,来和A进行比较,做差。这三个模式就是Union的3个模式,只是改了名字。
(我的项目里,我很少遇到B 存在重叠点的情况,我基本上用Binary模式就够了)
Difference 其实是“扫雷模式”
上面的步骤只是为了选出“B”,大多数情况是B的数据里是“不融并的”,A需要和B的每个点进行比较,有重叠的点,就100%排除,密度被设为0;这里还算好理解,主要是不重叠的点,密度也会发生改变!相邻的点密度也会被“扫雷”!
看图说话: 创建一排点,作为“B”: 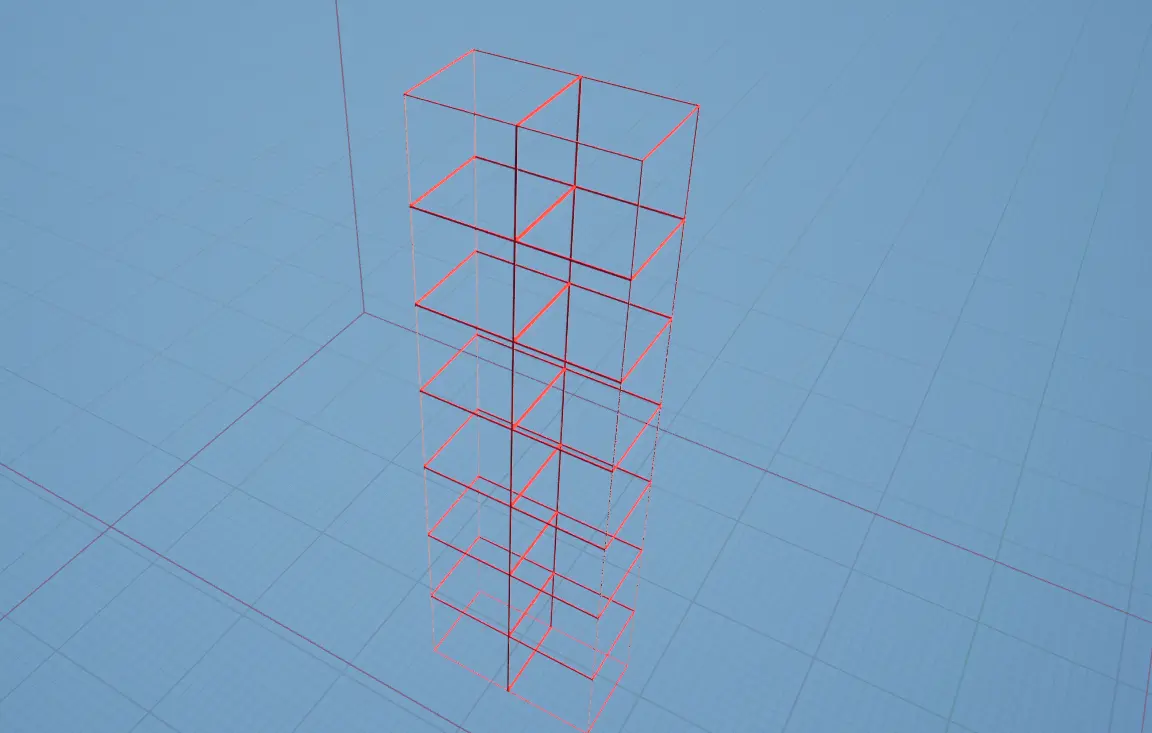
创建一堆点,作为源“A”, 并设置一点点噪声方便查看位置: 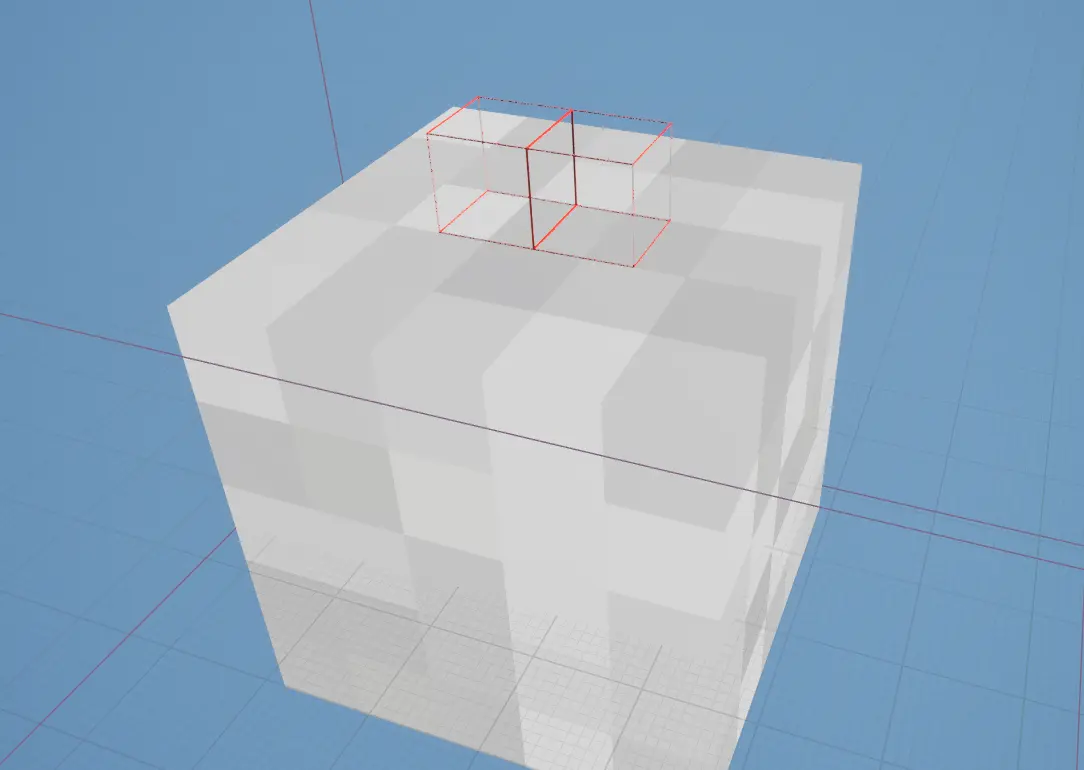
大致如下, 为了好查看勾选Keep Zero Density Points: 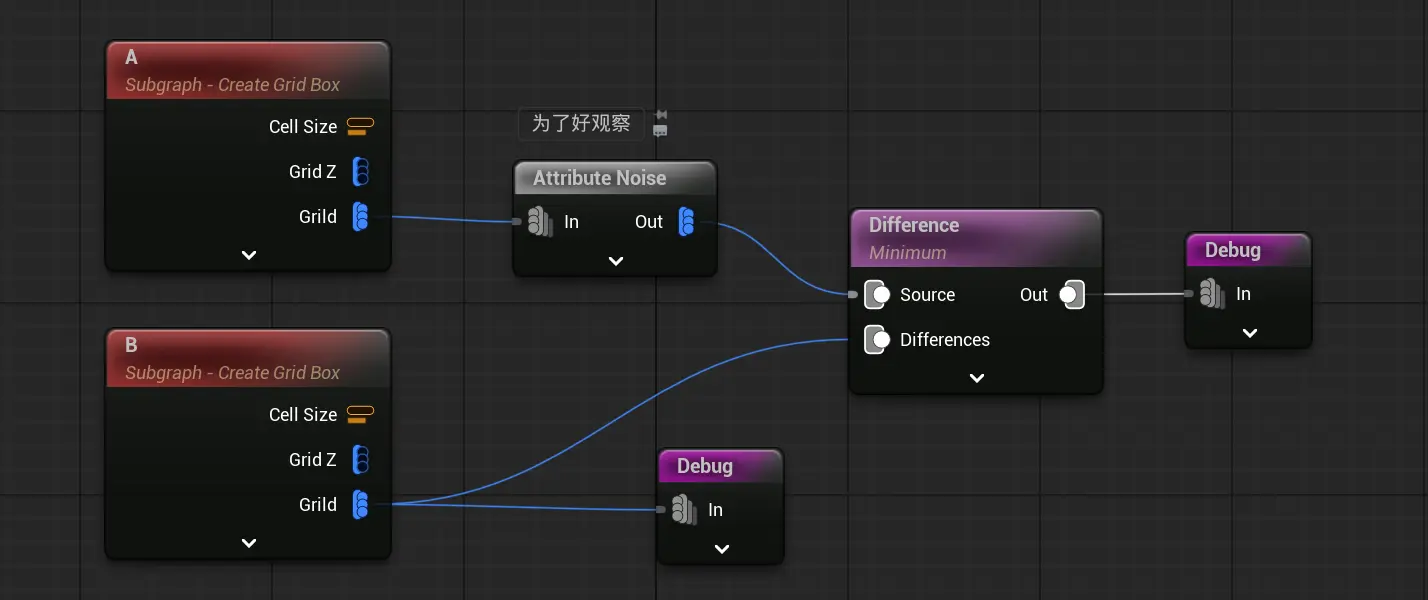
结果: 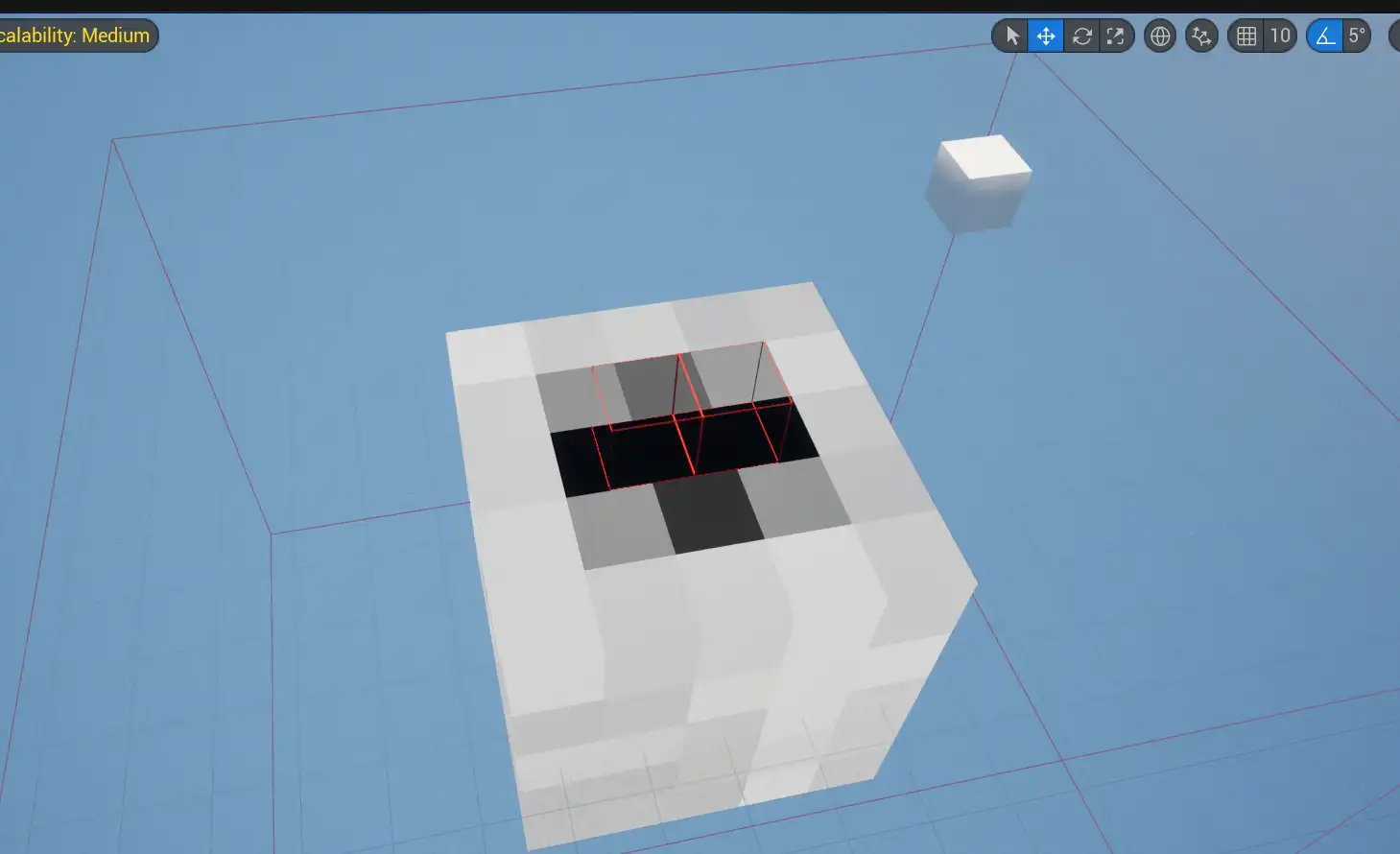
可以看到,红色的部分是“雷”,灰色的程度表达出附近雷的数量,黑色的部分就是与雷直接覆盖的点,密度是0;
改变一下 雷是数量试试: 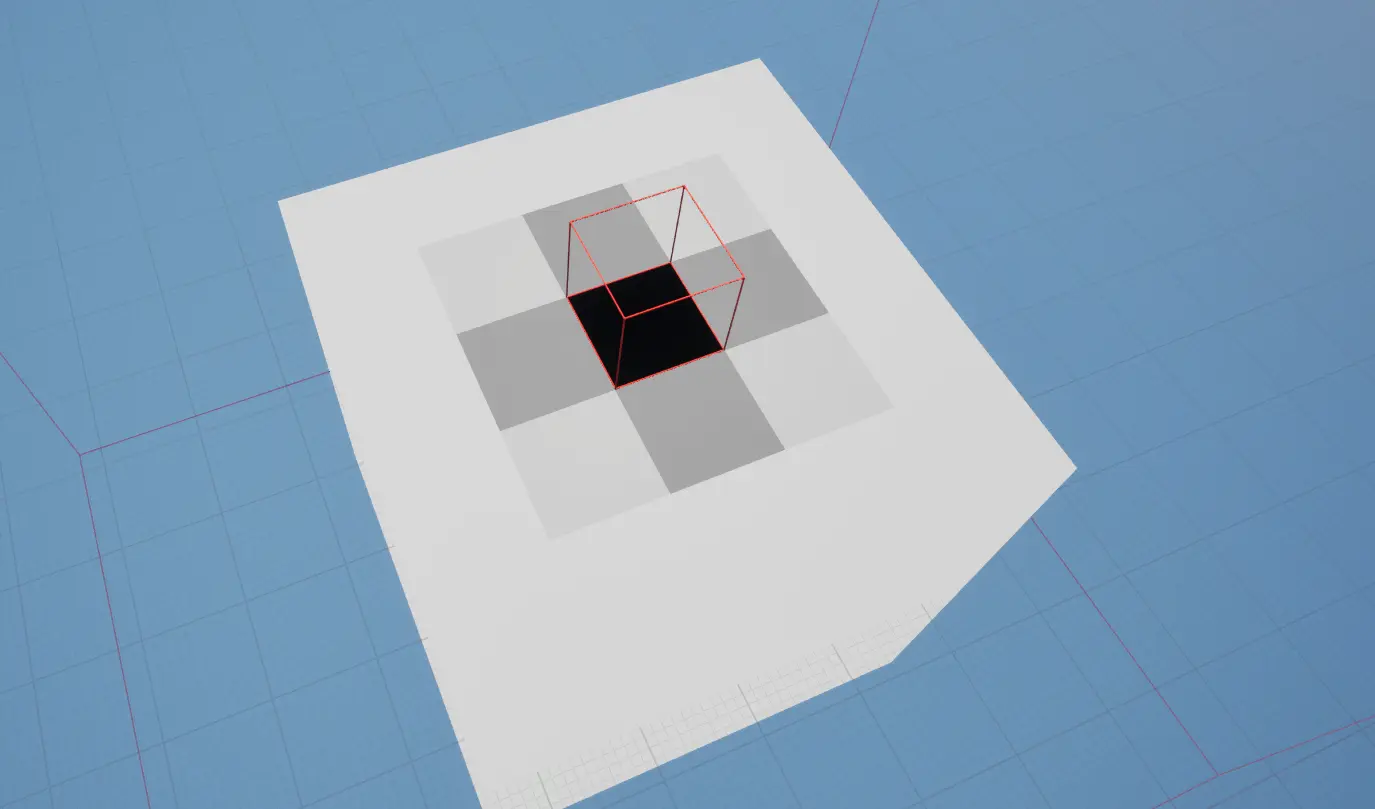
这样呢,为何看起来有重叠的部分,密度不是0?: 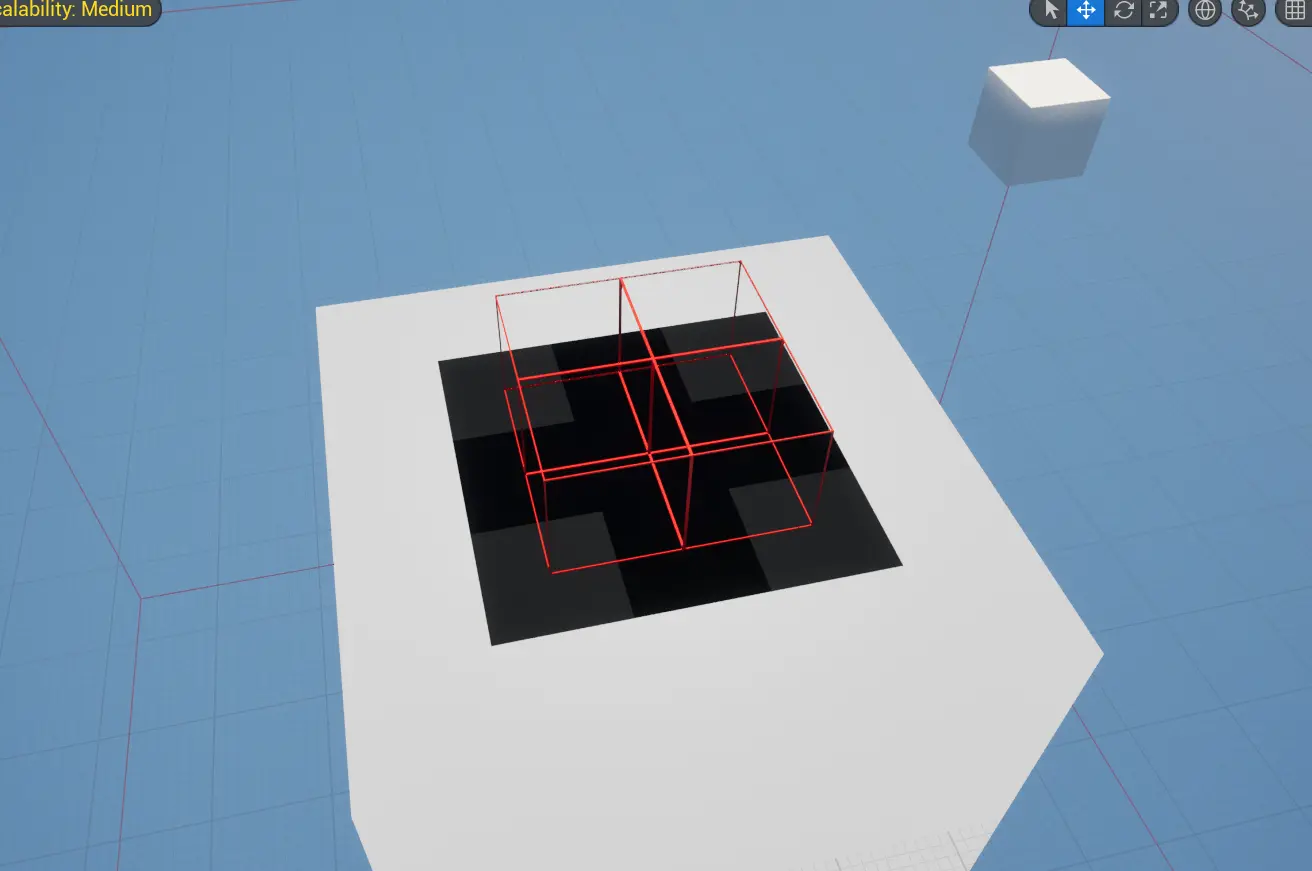 这里需要说明一下,最终结果是用B的质点来判断是不是在A的范围(Bounds)内,这里B的质点刚好在A的边上,所以密度不为0
这里需要说明一下,最终结果是用B的质点来判断是不是在A的范围(Bounds)内,这里B的质点刚好在A的边上,所以密度不为0
Difference 各种空间数据之间的区别
除了点与点之间差集,还有点与体积,其他空间数据类型的差集
Point vs Volume
找来一个体积,作为B,依附在A的表面上,A上的点没有产生任何密度变化,猜测体积是被当成了质点(没有边界): 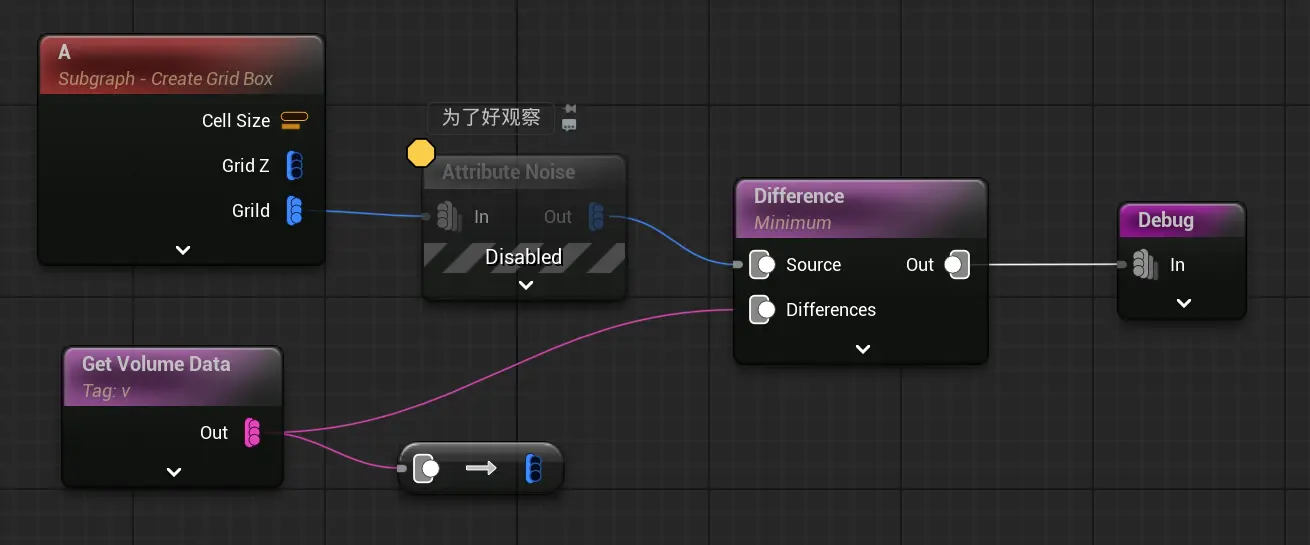
 把体积转为点,手动调用ToPoint节点,成功引起了密度变化,类似扫雷:
把体积转为点,手动调用ToPoint节点,成功引起了密度变化,类似扫雷: 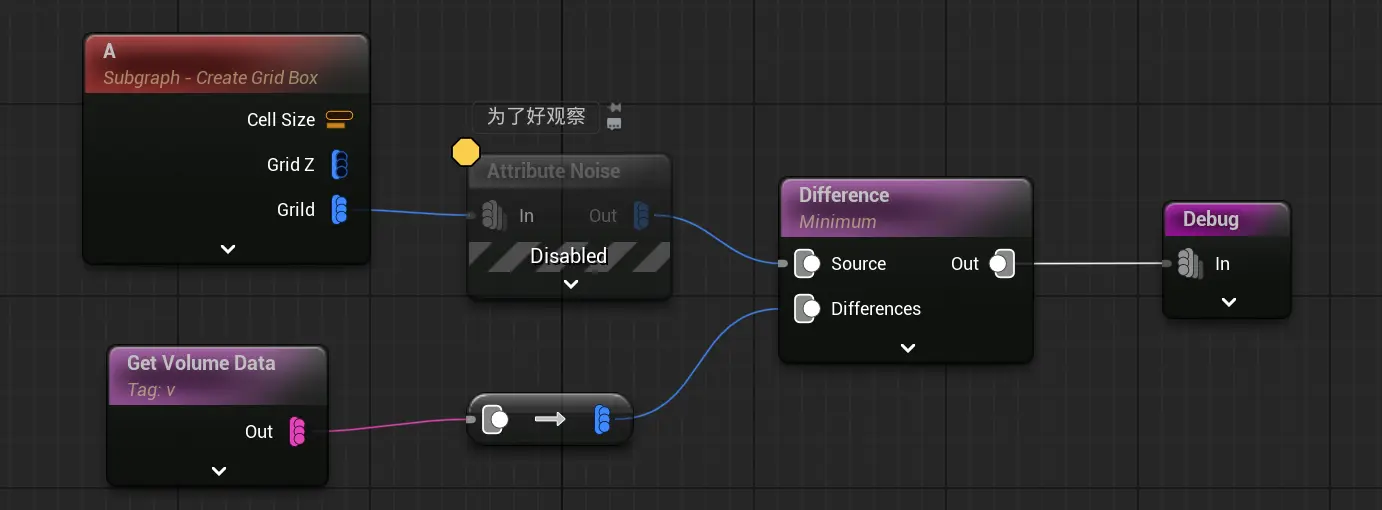
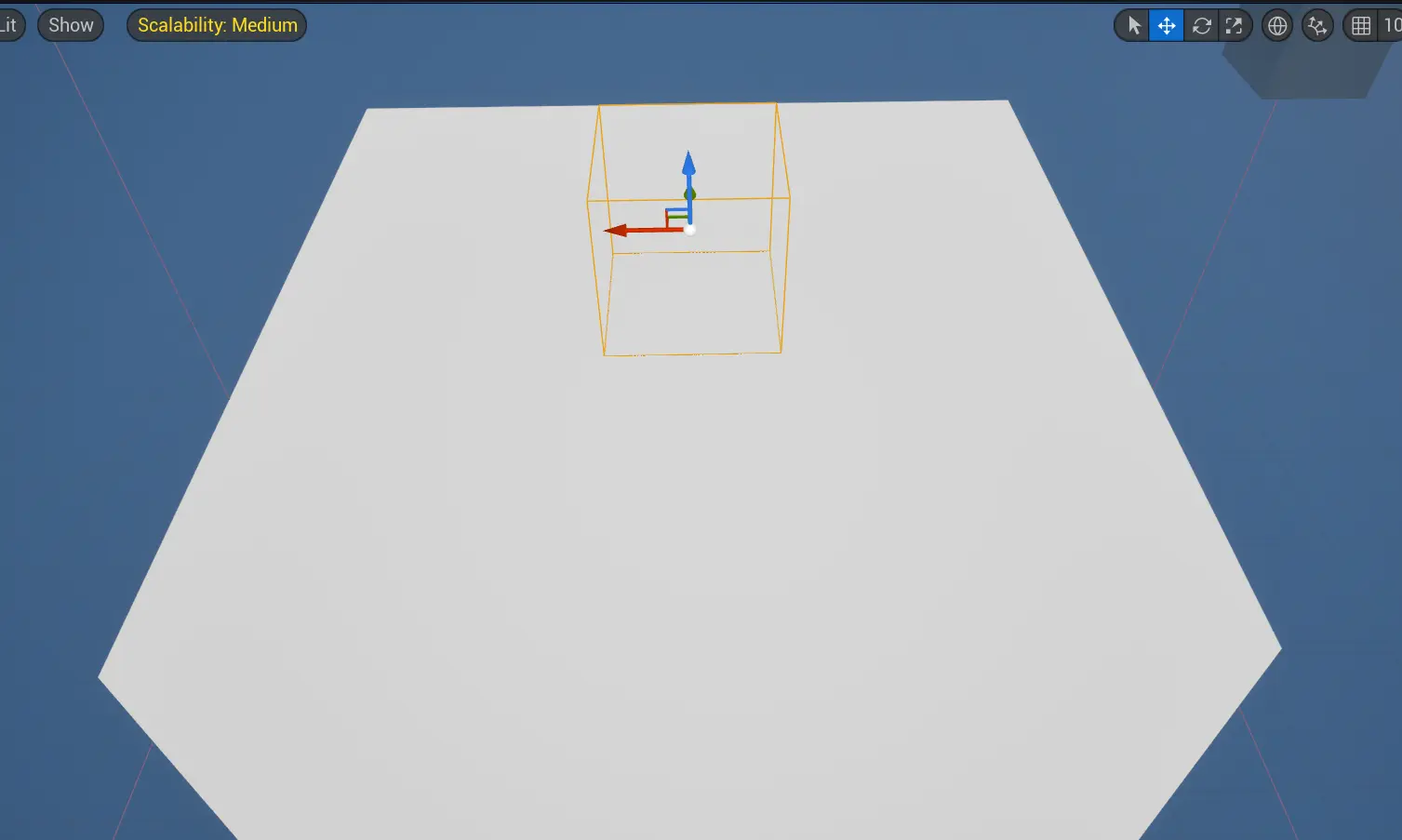
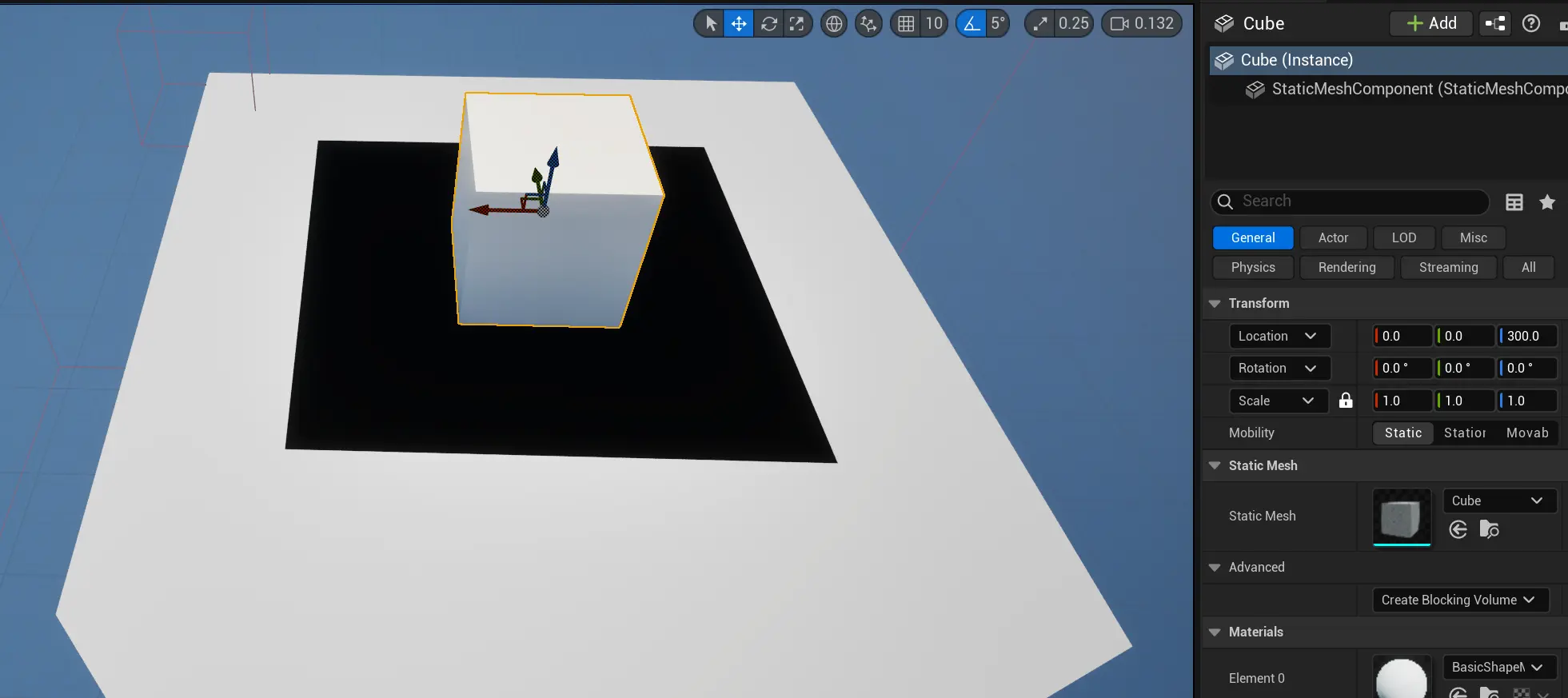
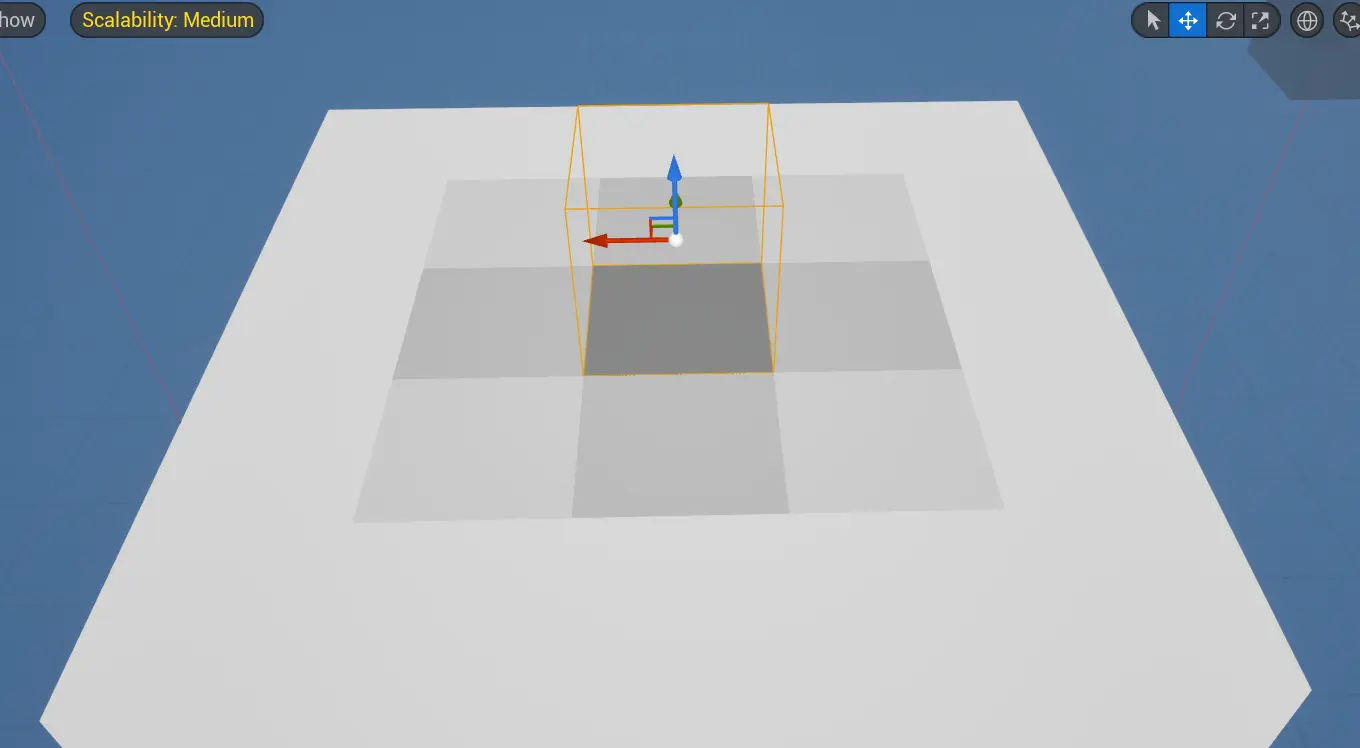 验证体积是否被当成了质点,把轴点沉入A里面,成功触发密度变化,且不是扫雷模式:
验证体积是否被当成了质点,把轴点沉入A里面,成功触发密度变化,且不是扫雷模式: 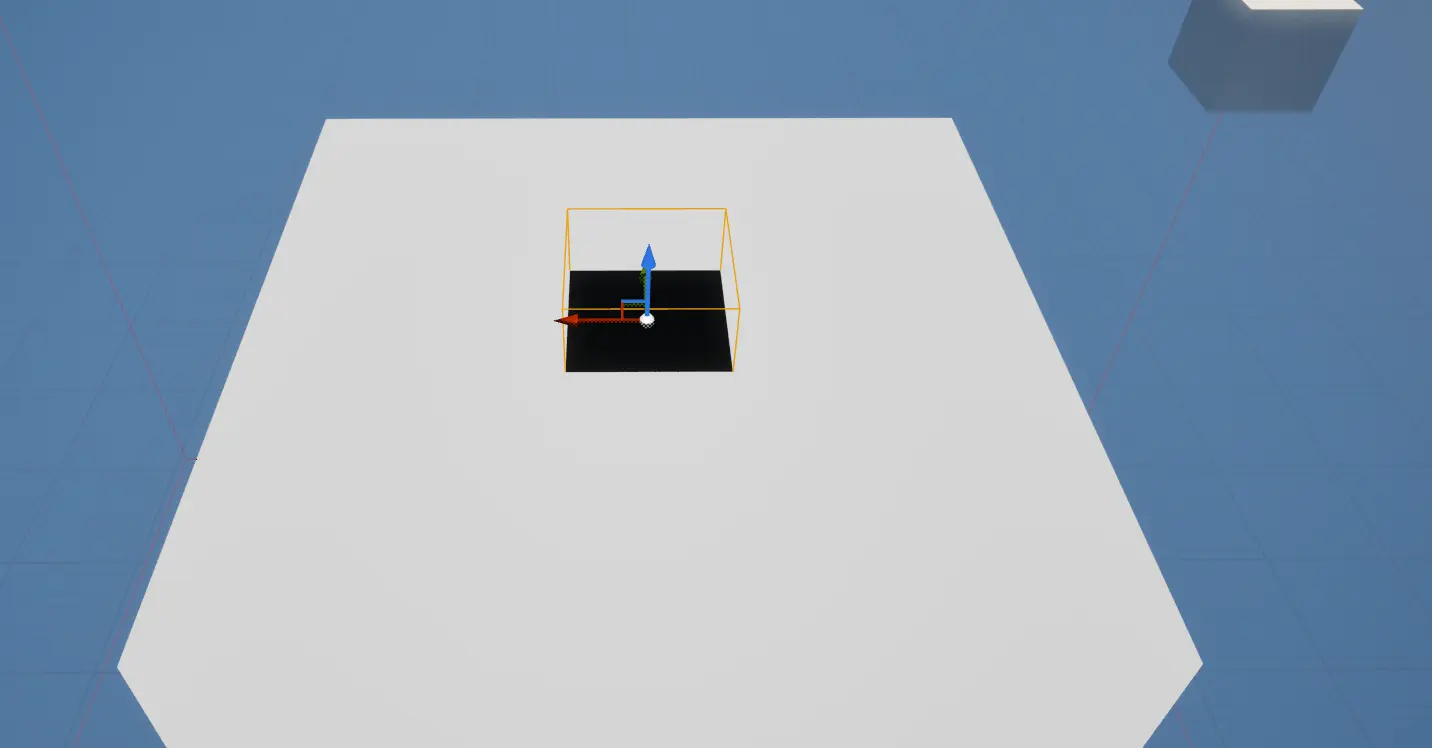 体积在数据上是有边界的,只是被当成质点处理了:
体积在数据上是有边界的,只是被当成质点处理了: 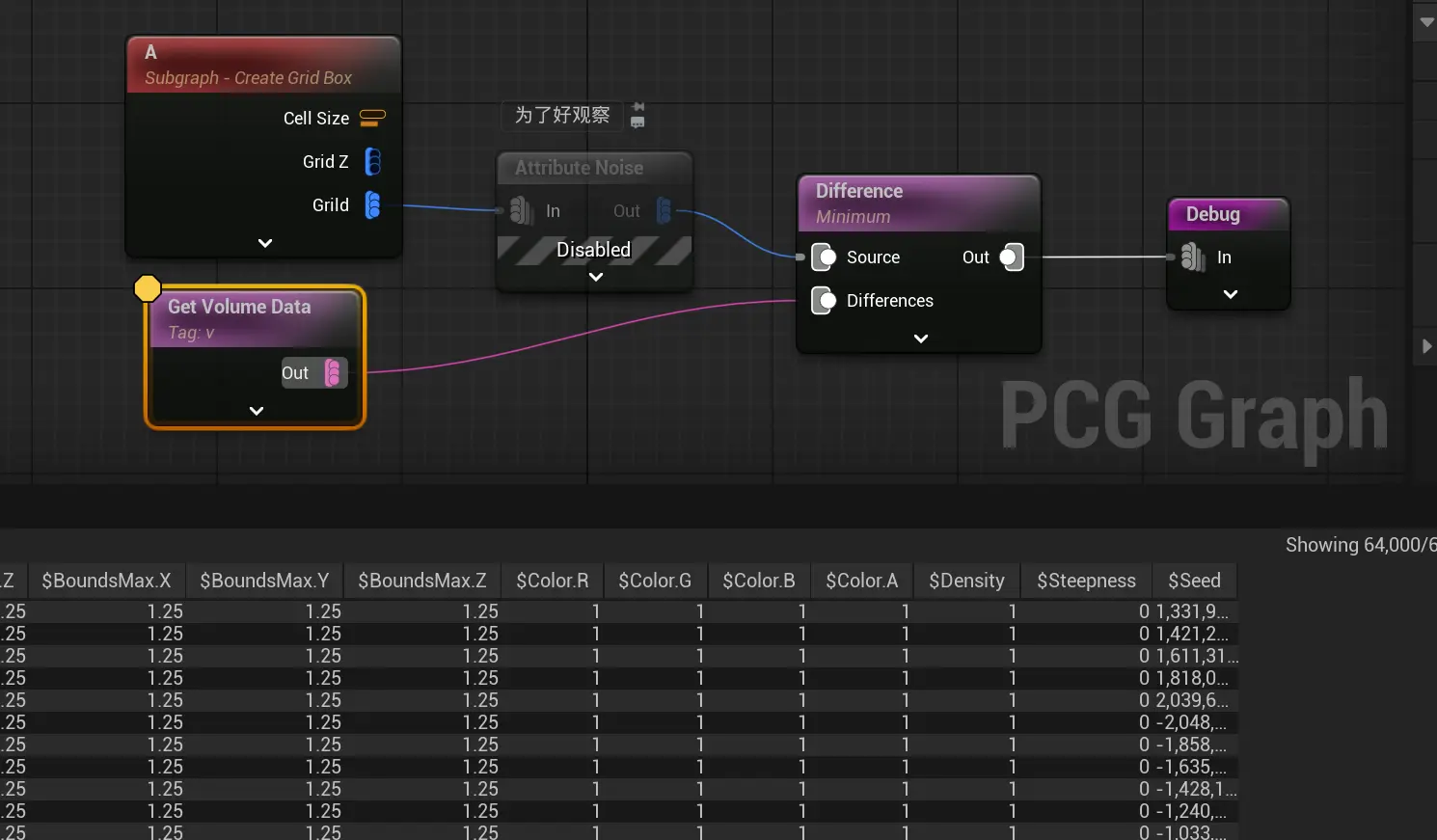
Point vs Primitive
找来一个图元,作为B,依附在A的表面上,居然染黑了全部和它有接触的点! 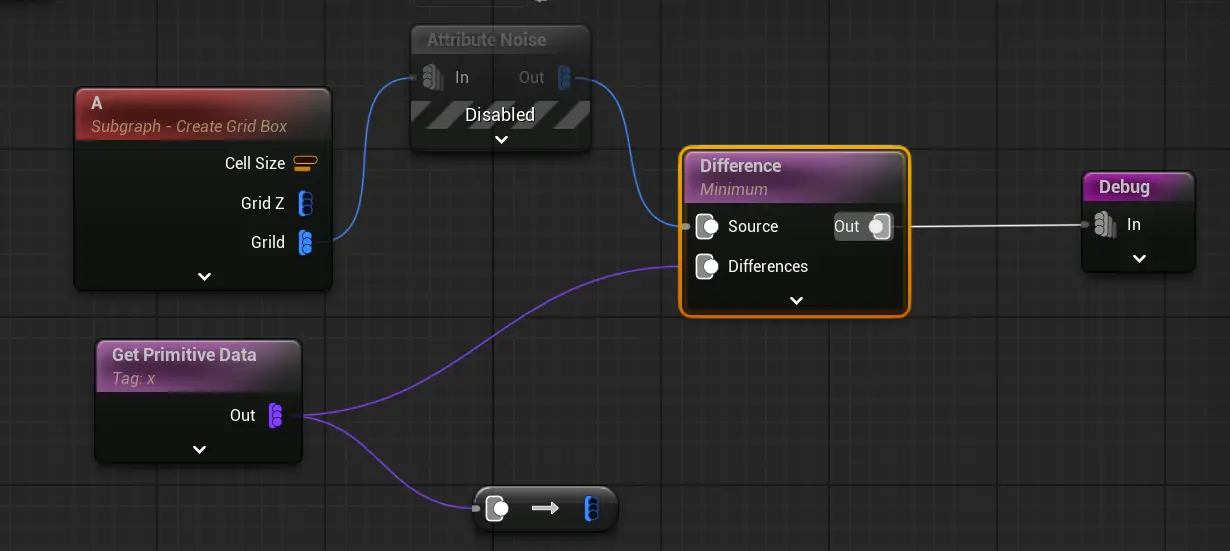
 再试试图元的to Points会怎样,发现在正中间是正常的,和本体重合。
再试试图元的to Points会怎样,发现在正中间是正常的,和本体重合。 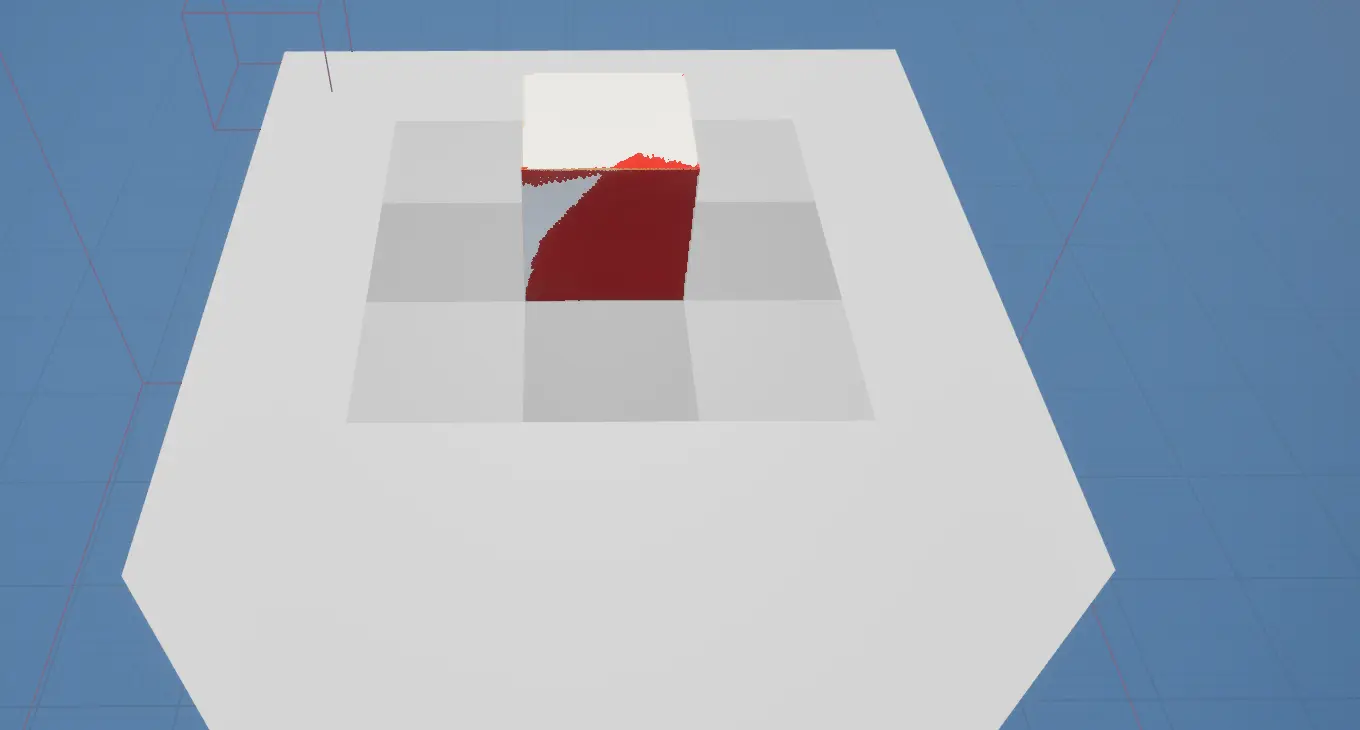 但不在正中间,位置和本体居然不一致!
但不在正中间,位置和本体居然不一致! 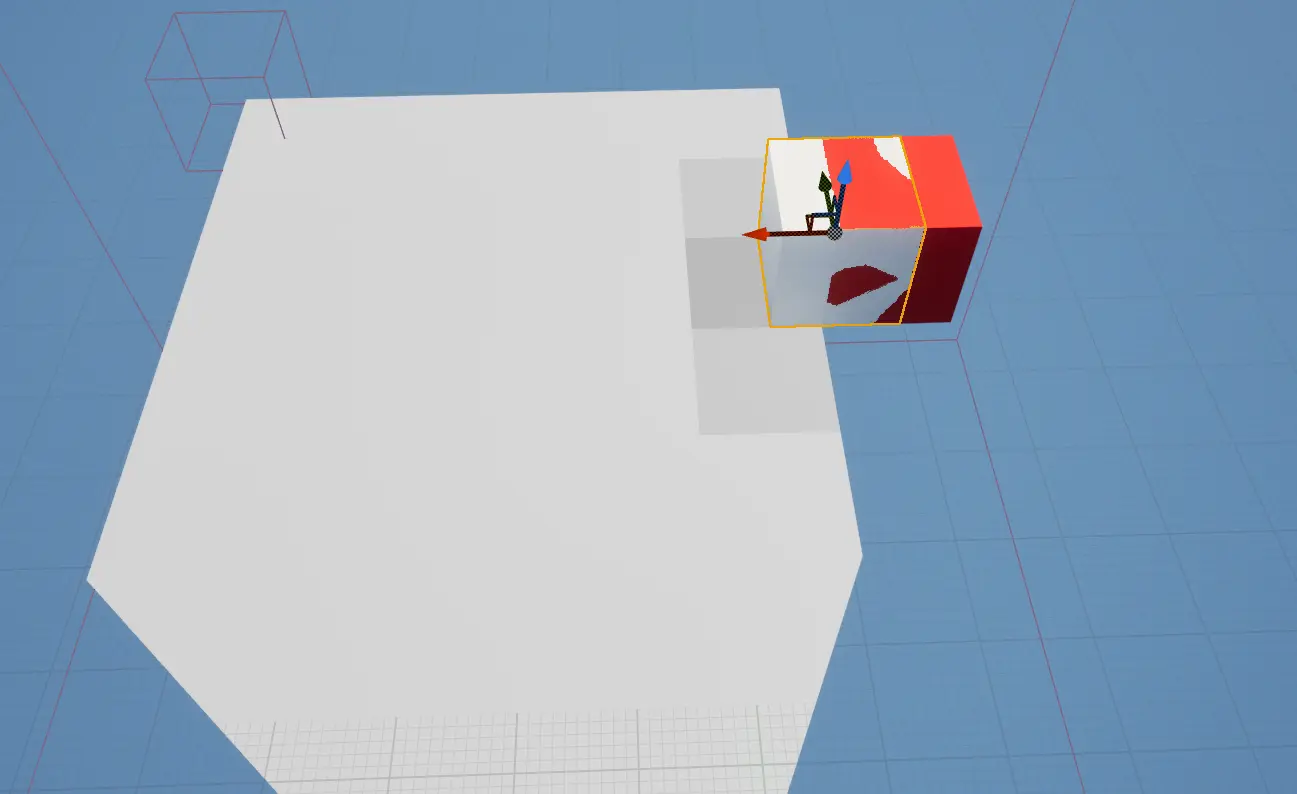
总之,图元的怪事挺多,小心为好。
Point vs Spline
Spline也是当做质点处理的,但凡偏移1个单位,密度就不为0了,即使它看起来穿过了A: 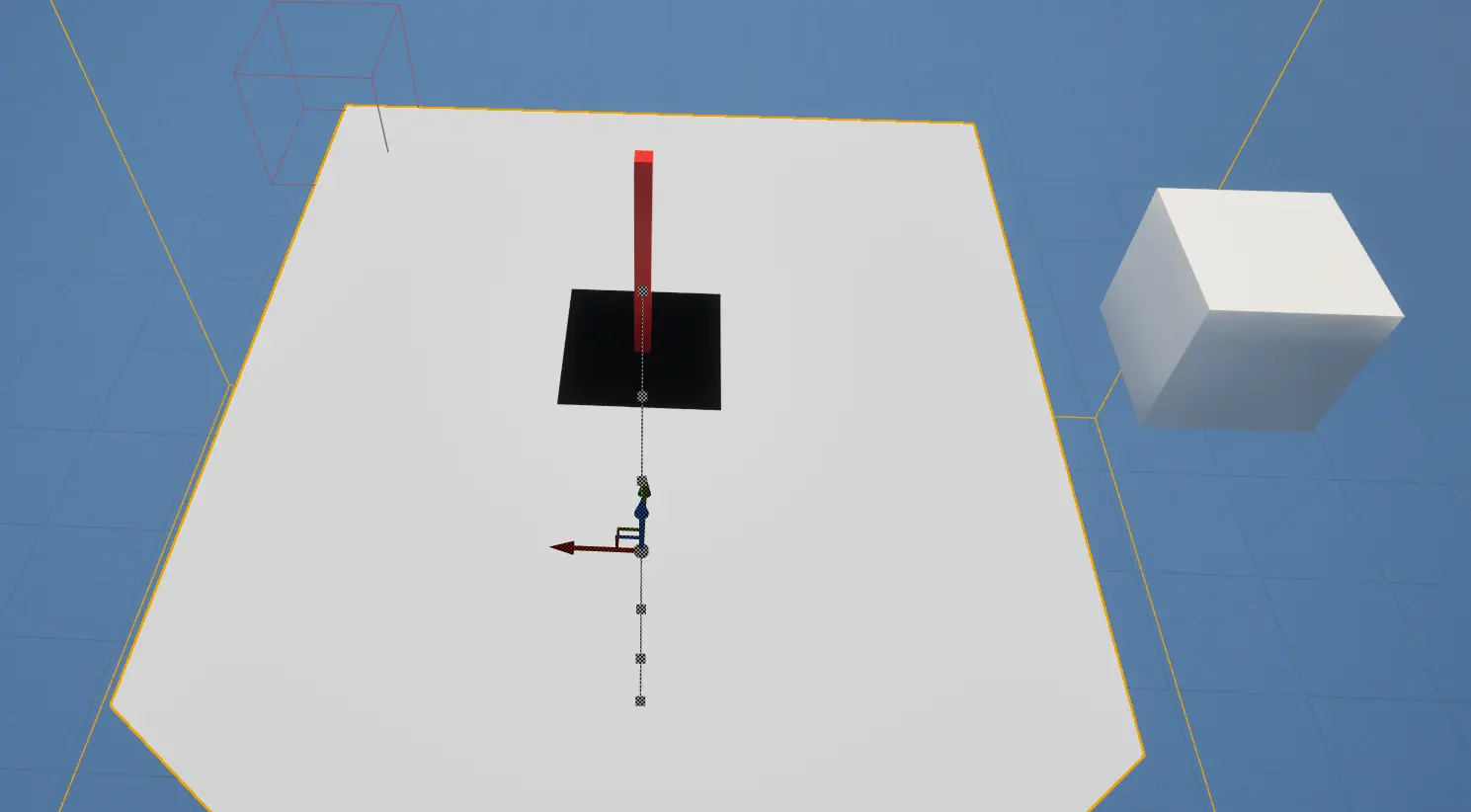
Spline vs Spline
好像没啥,都是质点,当在0-1的位置上偏移时,密度是会变化的。
One More Thing
Difference节点还有个“Mode”选项,三个模式;这些不会影响最终结果,但是会影响计算的效率。
总来说直接选自动推断就行,因为大部分场景都是点与点之间做差异,除非你知道自己在干什么。
- 推断模式: 自动推断,根据输入数据类型自动选择合适的在“连续”和“离散”之间选择,源码:cpp
// 根据输入数据类型自动决定输出类型,这段代码的意思是: //如果使用自动推断模式且源数据和差异数据都包含点数据,则输出为点数据 if ((Settings->Mode == EPCGDifferenceMode::Inferred && bHasPointsInSource && bHasPointsInDifferences)) { Output.Data = DifferenceData->ToPointData(Context); // 转换为点数据 }
连续模式:适合体积,没有缓存
离散模式:点与点的默认模式,性能较好,有缓存
参考:https://masonstevenson.dev/blog/unreal-pcg-difference-node-explained